
M&H - Series
Caution
- Doosan Robotics does not assume responsibility for any damages caused by the use of lifting equipment.
- If the robot is transported by packaging it with packaging materials, store the robot in a dry location. If the robot is stored in a location with high humidity, condensation may occur, resulting in robot defects.
- When relocating the robot, carefully consider the weight and have a suitable number of people hold the link and base of the robot.
- When relocating the controller, hold the handle on the side of the box.
- When transporting the robot or controller, make sure to maintain the proper posture. Failure to do so may result in back injury or other physical injuries.
- When transporting the robot using lifting equipment, make sure to observe all related national and regional regulations.
- Doosan Robotics does not assume responsibility for any damages or losses that occur during transportation, so make sure to transport the robot safely according to the user manual.
Quick Guide
Thank you for choosing this Doosan Robotics product.
This guide provides the minimum amount of information required for three handling methods for relocation and installation of the H-Series robot safely. Make sure to follow the instructions in this guide when handling the robot.
The manual for a specific software version of the robot. For details of updated manuals, refer to the Robot LAB website (robotlab.doosanrobotics.com).
- User Manual : This manual describes overall installation, robot work management and menus in the UI.
- Reference Manual : This manual describes workcell item, skill commands, task templates and key applications.
- Programming Manual : This manual describes the grammar and commands you need to know about task programming.
Cautions
- If the robot needs to be relocated, make sure to use the packing box, filling materials and packing equipment provided with the initial delivery. For this purpose, store the packaging materials and fillings in a dry, cool location.
- Industrial robots must be installed with careful consideration given to the inspection standards defined by the Regulations and Safety Inspection of the Occupational Safety and Health Standard Announcement (if the robot is subject to inspection).
- The robot can be transported using cranes and forklifts, hand lifts. When using crane-based lift equipment, you must comply with the corresponding regional and national regulations when using lifting equipment.
- For installation and relocation of the robot, please refer to the packing posture.
- Make sure whether all standard and additional (optional) components are included and contact the sales agent if there are any problems.
- The packaging materials and bolts are designed specifically for the relocation of the robot. Do not use them for any purposes other than relocating the robot.
- When relocating the robot, do not apply force to the exterior of the robot. Failure to comply with the instruction may result in injuries.
- Remove the packaging materials and bolts after installation. Make sure to store the packaging materials and bolts in case the robot needs to be relocated.
- Before relocation, make sure that the bolts and packaging materials are secure.
Product Composition
|
|
| Manipulator | Controller (AC/DC) |
|
|
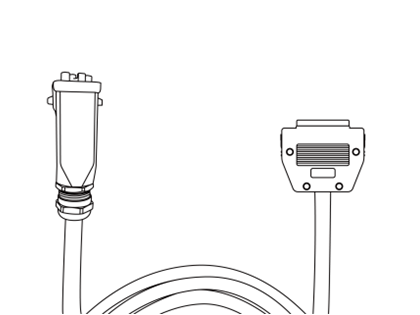
| Teach pendant | Controller power supply cable |
|
|
| Manipulator connection cable | User manual / Quick guide |

Note
- The laptop is not included in the package, and it is necessary when installing the DART-Platform.
- The DART-Platform is SW that runs on a Windows OS-based desktop or laptop. That can operate and program the same as the Teach Pendant.
- For details of optional items, refer to the website (www.doosanrobotics.com).
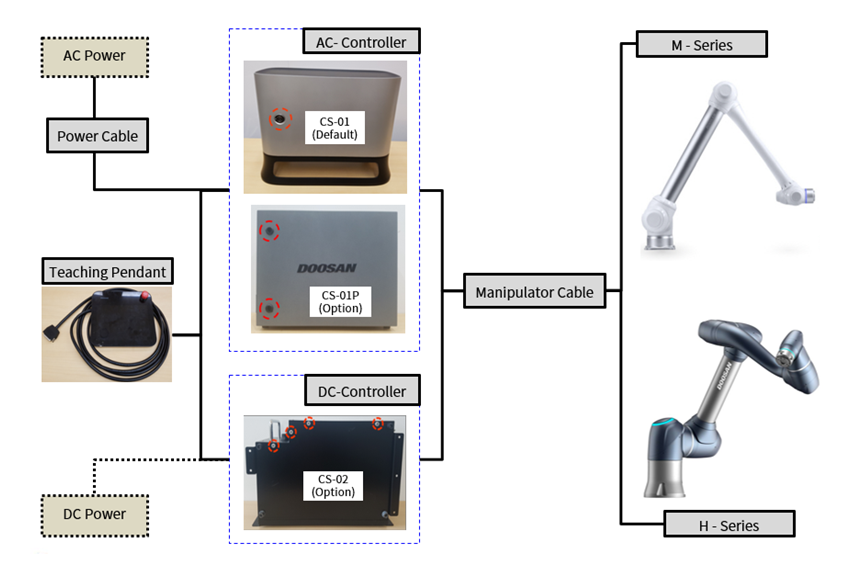
Robot System Configurations
Refer to the robot system configurations of the M Series and H Series below.
Transportation
Cautions during Transportation
- In case of relocating the M series to an installation location, please carry it by lifting the shaded area described below. To prevent accidents, please lift and carry the robot with sufficient personnel (2 or more people) simultaneously considering the weight of each type of robot.

- Especially for H-series, refer to the "H-Series Handling Guide" and make sure to carry it in accordance with the safety regulations of the country.
- The controller is moved by grasping the bottom handle.
- Please be careful of the accidents caused by falling while carrying the robot.
- When transporting the robot using lifting equipment, make sure to observe all related national and regional regulations.
- Doosan Robotics does not assume responsibility for any damages or losses that occur during transportation, so make sure to transport the robot safely according to the user manual.
- For the H-series, depending on the date of manufacture, you may receive either a vertical box (before July of 2022) or a horizontal box (after July of 2022). Please refer to the guide below as handling is different depending on the shape of the package.
H-Series Handling Guide
Packing Condition
- If you move the Packing, please use the forklift at the bottom of the package.
- Please check the handling mark at Box outside
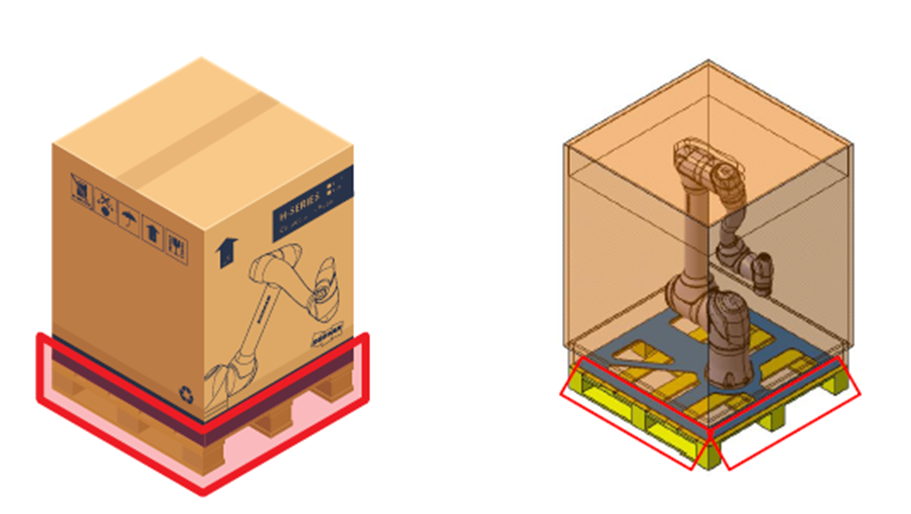
[ Packing Condition(Vertical): Use the forklift ]
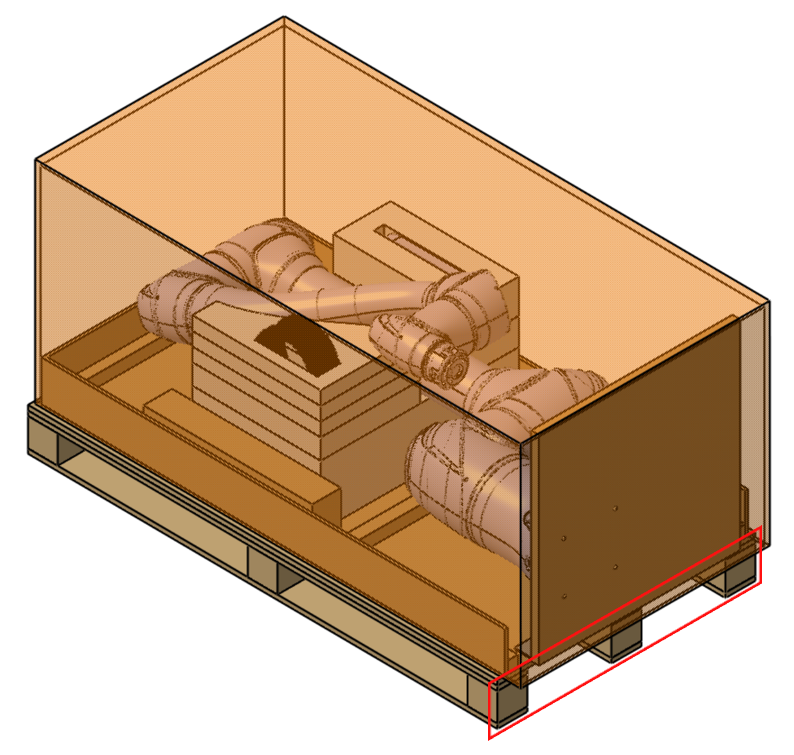
[ Packing Condition(Horizontal): Use the forklift ]

[ Handling Marks ]
Handling the Manipulator at unpacking
- Should be complying with the regional and national transport work standards.
- If you used the other equipment, use capable the ropes or structures.
- Our recommend is the use of lifting jig Supplied by Doosan robotics.
- Our recommend is the use of rotation resistant wire rope enough to withstand the weight.
- The length of the ropes must be at least 1500 mm, and it is recommended to support 4 points of the robot at least.
| Item | Minimum Load capacity |
|---|---|
Crane | 1,000 kg |
Wire rope (EA) | 1,000 kg |
The lifting jig
- When fixing the rope to the robot frame, please use it after attaching a rubber lifting jig between 3-4 axes (refer to below).
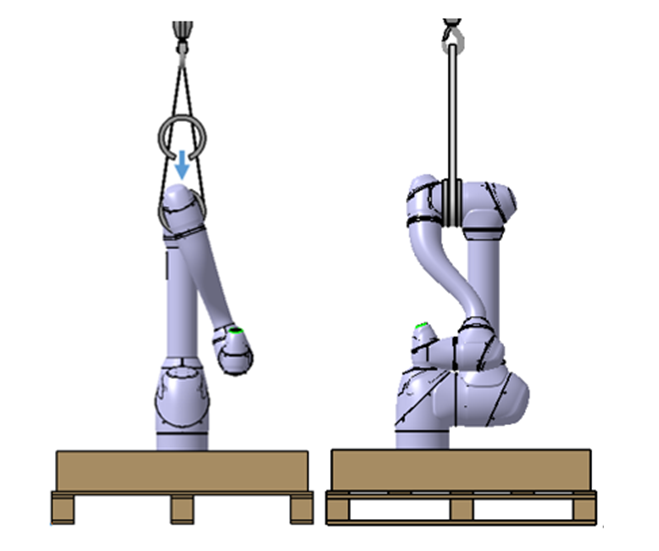
[ Moving the robot(Vertical) ]
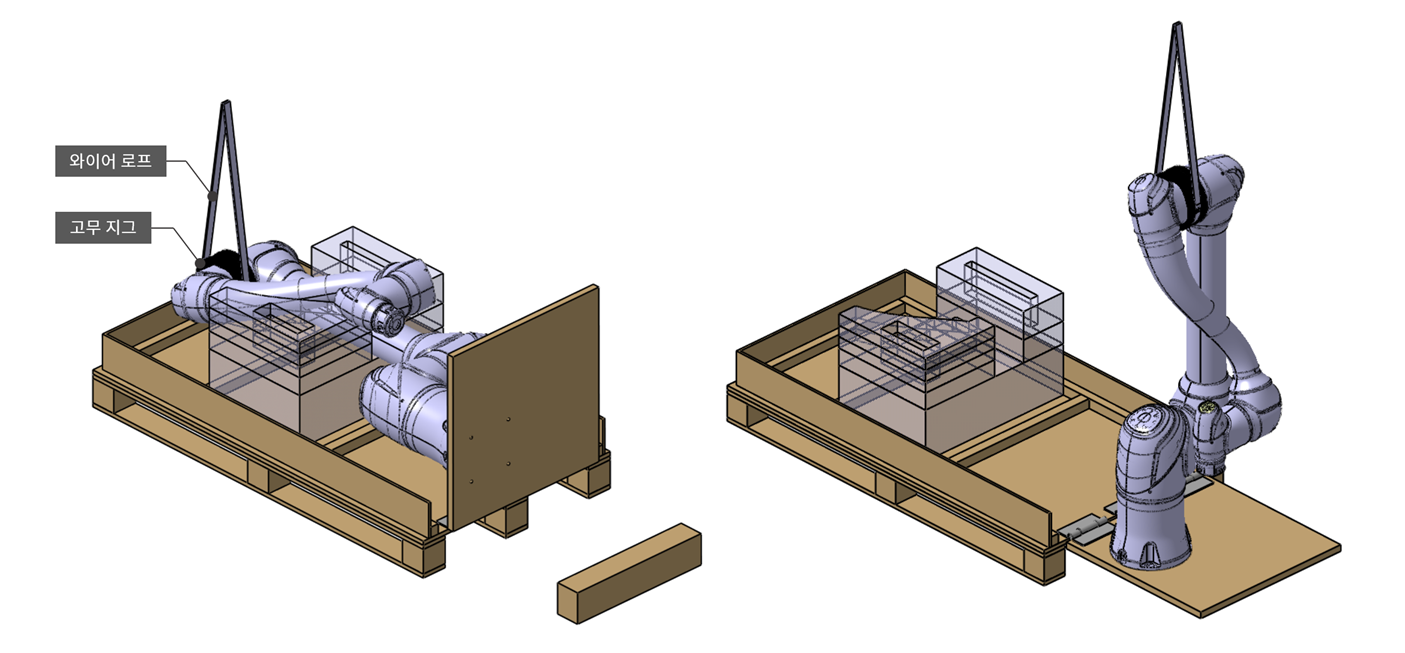
[ Moving the robot(Horizontal) ]
Note
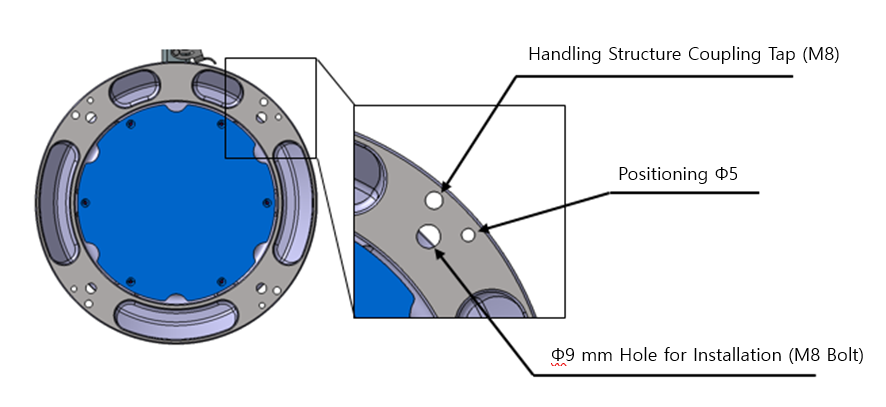
For H-Series, four M8 Taps are applied to the base to facilitate handling.
Installation
Cautions during Installation
- Before installing the robot, secure sufficient space and install the robot on a firm, even surface.
- Check whether flammable and explosive materials are near the installation location.
- Safety devices to be connected to the controller must be connected to a safety contact input terminal or a configurable digital I/O set to Safety I/O using dual signals. If safety devices are connected a regular I/O or are connected using single signals, the devices cannot satisfy the required safety level.
Securing the manipulator
- Use M8 bolts in the four 9.0 mm holes on the manipulator base to secure the robot.
- It is recommended to use tightening torque of 20 Nm to tighten the bolts. and use a washer (plain or spring) to prevent loosening of the tension caused by vibration.
- Use a Φ5 place marker pin to accurately install the manipulator in a fixed location.
- Ensure that the mounting bolts are completely tightened during installation. If the mounting bolts become loose, the base and manipulator may separate during operation, resulting in breakdowns.
- The robot will interpret manipulator base vibration as a collision and engage the emergency stop. Therefore, for installation locations that automatically shift position, do not install the manipulator base in a location with high movement acceleration.
- Make sure that safety measurements and robot safety setting parameters are correctly defined according to the risk assessment. If this is not established, the robot may be damaged or the user may be injured.
- Correctly set robot installation-related settings such as robot mounting angle, TCP weight, TCP offset and safety settings. If this is not established, the robot may be damaged or the user may be injured.
- For H-series, the robot can only be installed on the floor. To prevent safety accidents, consider the weight of the robot and refer to “H-Series Handling Guide” provided in this manual.
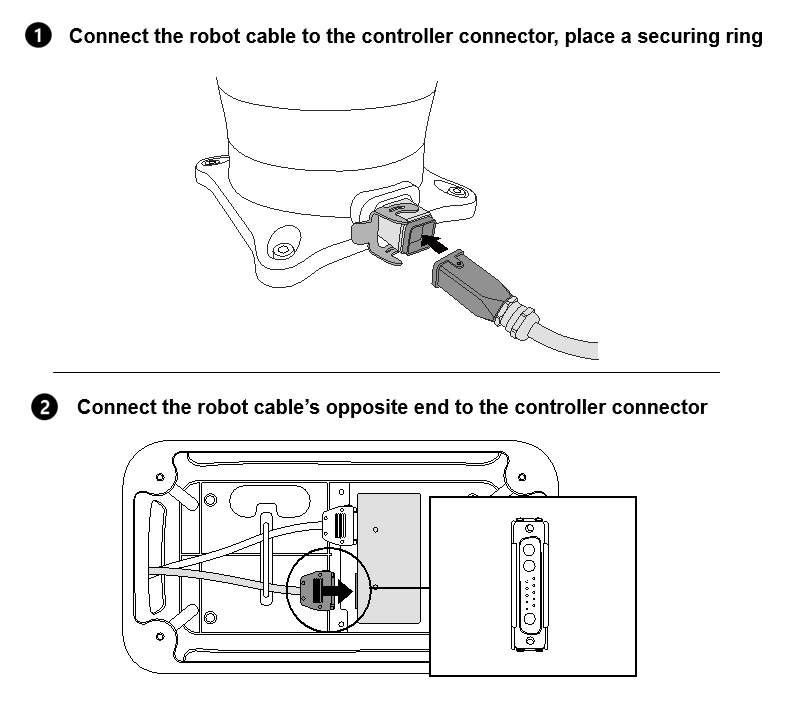
Connecting the manipulator and controller
- Connect the manipulator cable to the corresponding controller connector and place a securing ring on it to prevent the cable from becoming loose. Push the manipulator cable’s opposite end into the corresponding controller connector until a click is heard to prevent the cable from becoming loose.
※ For the details of the installation, refer to the installation manual.
DART-Platform
Please install DART-Platform in advance. The installer download can be found in Robot LAB>Resources>Software (https://robotlab.doosanrobotics.com/en/MyRobot/Dashboard). To download the installer, you need to log in the Robot LAB.
- When the installation of DART-Platform is completed, proceed in the order shown below:
- Turn on the power switch at the bottom of the controller.
- Connect your desktop or Laptop to the controller.
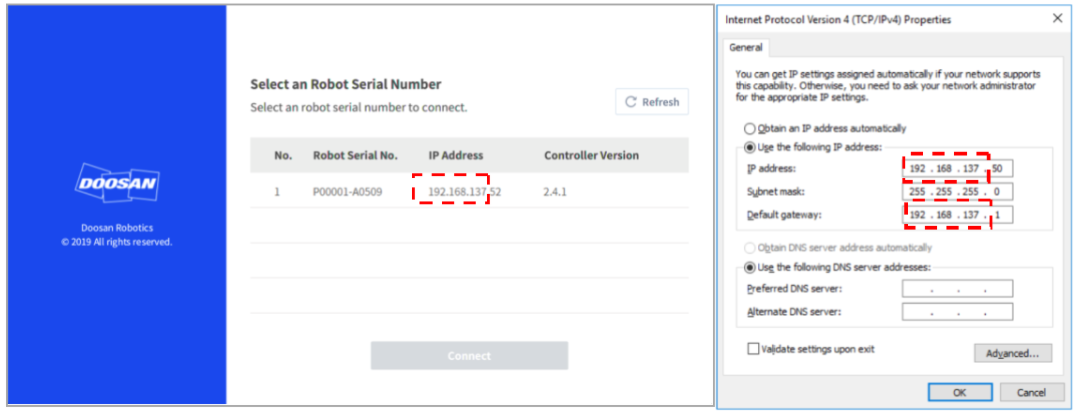
- After about 1 minute after booting starts, run the DART-Platform and check the serial number of the robot connected to the network.
- Select and connect the robot you want to connect to.
Note
If there is no connection between the controller and DART-Platform, change the C class band of IP address and default gateway of the desktop or laptop with DART-Platform installed to the C class band of the controllers IP address, and retry.
Copyright
The copyright and intellectual property rights of the contents of this manual are held by Doosan Robotics. It is therefore prohibited to use, copy, or distribute the contents without written approval from Doosan Robotics. In the event of abuse or modification of the patent rights, the user will be solely responsible for the consequences.
While the information in this manual is reliable, Doosan Robotics is not responsible for any damage that occurs due to errors or typos. The contents of this manual may be modified according to product improvement without prior notification.
This is a detailed manual for a specific software version of the robot. For details of updated manuals, refer to the Robot LAB website (https://robotlab.doosanrobotics.com/).
OSS
The software installed in this product was developed based on free/open source software.
Details about the free/open source software license can be found on the OSS use page on the Doosan Robotics website (www.doosanrobotics.com/kr/oss/license).
For related inquires, contact the Marketing Department of Doosan Robotics (marketing.robotics@doosan.com).