
amovec()
Features
The asynchronous movec motion operates in the same way as movec except that it does not have the radius parameter for blending. The command is the asynchronous motion command, and the next command is executed without waiting for the motion to terminate.
Note
- movec(pos1. pos2): The next command is executed after the robot starts from the current position and reaches (stops at) pos2.
- amovec(pos1. pos2): The next command is executed regardless of whether the robot starts from the current position and reaches (stops at) pos2.
Parameters
Parameter Name | Data Type | Default Value | Description |
pos | posx | - | posx or position list |
list (float[6]) | |||
pos2 | posx | - | posx or position list |
list (float[6] | |||
vel (v) | float | None | velocity or velocity1, velocity2 |
list (float[2]) | |||
acc (a) | float | None | acceleration or acceleration1, acceleration2 |
list (float[2]) | |||
time (t) | float | None | Reach time [sec] |
ref | int | None | reference coordinate
|
mod | int | DR_MV_MOD_ABS | Movement basis
|
angle (an) | float | None | angle or angle1, angle2 |
list (float[2]) | |||
ra | int | DR_MV_RA_DUPLICATE | Reactive motion mode
|
ori | int | DR_MV_ORI_TEACH | Orientation mode
|
app_type | int | DR_MV_APP_NONE | Application mode
|
Note
- Abbreviated parameter names are supported. (v:vel, a:acc, t:time, angle:an)
- _global_velx is applied if vel is None. (The initial value of _global_velx is 0.0 and can be set by set_velx.)
- _global_accx is applied if acc is None. (The initial value of _global_accx is 0.0 and can be set by set_accx.)
- If an argument is inputted to vel (e.g., vel=30), the input argument corresponds to the linear velocity of the motion while the angular velocity is determined proportionally to the linear velocity.
- If an argument is inputted to acc (e.g., acc=60), the input argument corresponds to the linear acceleration of the motion while the angular acceleration is determined proportionally to the linear acceleration.
- If the time is specified, values are processed based on time, ignoring vel and acc.
- If the time is None, it is set to 0.
- _g_coord is applied if the ref is None. (The initial value of _g_coord is DR_BASE, and it can be set by the set_ref_coord command.)
- If the mod is DR_MV_MOD_REL, pos1 and pos2 are defined in the relative coordinate system of the previous pos. (pos1 is the relative coordinate from the starting point while pos2 is the relative coordinate from pos1.)
- If the angle is None, it is set to 0.
- If only one angle is entered, the angle applied will be the total rotation angle of the circular path.
- If two angle values are inputted, angle1 refers to the total rotating angle moving at a constant velocity on the circular path while angle2 refers to the rotating angle in the rotating section for acceleration and deceleration. Here, the robot moves on the circular path at a total movement angle of angle1 + 2xangle2.
- Refer to the description of the movej() motion for the path of the blending according to option ra and vel/acc.
- If ‘app_type’ is ‘DR_MV_APP_WELD’, parameter ‘vel’ is internally replaced by the speed setting entered in app_weld_set_weld_cond(), not the input value of ‘vel’.
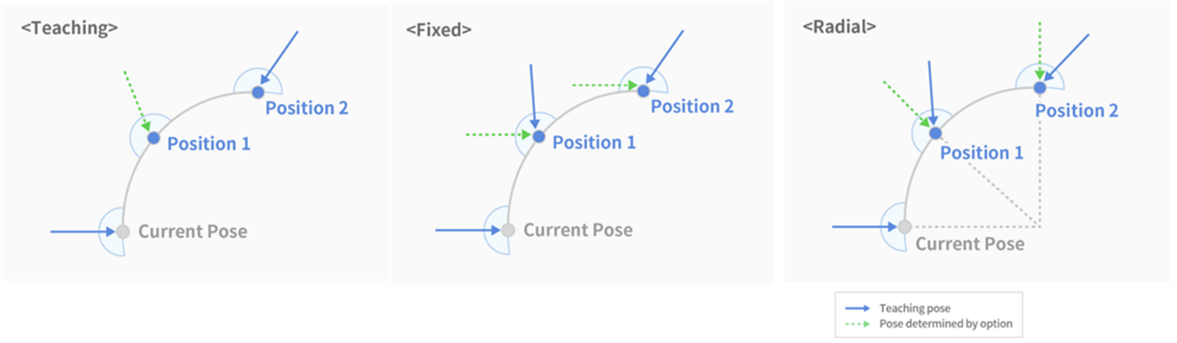
- ori’(orientation mode) is defined as below.
- DR_MV_ORI_TEACH(orientation based on teaching) : It moves while changing the current pose to the teaching pose of Pose 2, proportionate to the movement distance.The orientation of the taught pose, ‘pose 1’ is ignored.
- DR_MV_ORI_FIXED(fixed orientation) : Move along the path while maintaining the initial orientation up to the taught pose, ‘pose2’.
- DR_MV_ORI_RADIAL(orientation constrained radially) : Move along the path while maintaining radial orientation at the initial pose to the ‘pose 2
Return
| Value | Description |
|---|---|
0 | Success |
Negative value | Error |
Exception
| Exception | Description |
|---|---|
DR_Error (DR_ERROR_TYPE) | Parameter data type error occurred |
DR_Error (DR_ERROR_VALUE) | Parameter value is invalid |
DR_Error (DR_ERROR_RUNTIME) | C extension module error occurred |
DR_Error (DR_ERROR_STOP) | Program terminated forcefully |
Example
#Example 1. D-Out 3 seconds after the arc motion through x1 and x2 begins
p0 = posj(-148,-33,-54,180,92,32)
movej(p0, v=30, a=30)
x1 = posx(784, 443, 770, 0, 180, 0)
amovejx (x1, vel=100, acc=200, sol=2) # Performs the next motion immediately after beginning a joint motion with x1.
wait(2) # Temporarily suspends the program execution for 2 seconds (while the motion continues).
set_digital_output(1, 1) # D-Out (no. 1 channel) ON
mwait(0)Related commands
- posx(X=0, Y=0, Z=0, A=0, B=0, C=0)
- set_velx(vel1, vel2)
- set_velx(vel)
- set_accx(acc1, acc2)
- set_accx(acc)
- set_tcp(name)
- set_ref_coord(coord)
- mwait(time=0)
- movec()