
amove_spiral()
Features
The asynchronous move_spiral motion operates in the same way as move_spiral() except for the asynchronous processing and executes the next line after the command is executed.
Generating a new command for the motion before the amove_spiral() motion results in an error for safety reasons. Therefore, the termination of the amove_spiral() motion must be confirmed using mwait() or check_motion() between amove_spiral() and the following motion command.
Motion along a spiral trajectory on a plane which is perpendicular to the input 'axis' is performed on the specified coordinate system 'ref'. Additional input, travel distance 'lmax' can cause the robot to move around a cone, starting from the apex of it
Note
- move_spiral: The next command is executed after the robot starts from the current position and reaches (stops at) the end point of the spiral trajectory.
- amove_spiral: The next command is executed after the robot starts from the current position and regardless of whether it reaches (stops at) the end point of the spiral trajectory.
Parameters
Parameter Name | Data Type | Default Value | Range | Description |
rev | float | 10 | rev > 0 | Total number of revolutions |
rmax | float | 10 | rmax > 0 | Final spiral radius [mm] |
lmax | float | 0 | Distance moved in the axis direction [mm] | |
vel (v) | float | None | velocity | |
acc (a) | float | None | acceleration | |
time (t) | float | None | time ≥ 0 | Total execution time <sec> |
axis | int | DR_AXIS_Z | - | axis
|
ref | Int | DR_TOOL | - | reference coordinate
|
Note
- Abbreviated parameter names are supported. (v:vel, a:acc, t:time)
- rev refers to the total number of revolutions of the spiral motion.
- Rmax refers to the maximum radius of the spiral motion.
- Lmax refers to the parallel distance in the axis direction during the motion. A negative value means the parallel distance in the –axis direction.
- Vel refers to the moving velocity of the spiral motion.
- The first value of _global_velx (parallel velocity) is applied if vel is None. (The initial value of _global_velx is 0.0 and can be set by set_velx.)
- Acc refers to the moving acceleration of the spiral motion.
- The first value of _global_accx (parallel acceleration) is applied if acc is None. (The initial value of _global_accx is 0.0 and can be set by set_accx.)
- If the time is specified, values are processed based on time, ignoring vel and acc.
- If the time is None, it is set to 0.
- The axis defines the axis that is perpendicular to the surface defined by the spiral motion.
- Ref refers to the reference coordinate system defined by the spiral motion.
- This function does not support online blending of previous and subsequent motions.
Caution
- An error can be generated to ensure safe motion if the rotating acceleration calculated by the spiral path is too great.
In this case, reduce the vel, acc, or time value.
Return
| Value | Description |
|---|---|
0 | Success |
Negative value | Error |
Exception
| Exception | Description |
|---|---|
DR_Error (DR_ERROR_TYPE) | Parameter data type error occurred |
DR_Error (DR_ERROR_VALUE) | Parameter value is invalid |
DR_Error (DR_ERROR_RUNTIME) | C extension module error occurred |
DR_Error (DR_ERROR_STOP) | Program terminated forcefully |
Example
## hole search
# (A motion that completes 9.5 revolutions (rev) to the 30 mm radius (rmax) from 0 on the Tool-X/Y surface as the center of the rotation in the Tool-Z direction
# and the spiral trajectory that moves 50 mm (lmax) in the Tool-Z direction at the same time in 20 seconds
# from the initial position.
# D-Out (no. 1 channel) 3 seconds after the motion begins.)
J00 = posj(0,0,90,0,60,0)
movel(J00, vel=30, acc=30) # Joint moves to the beginning pose
amove_spiral(rev=9.5,rmax=50.0,lmax=50.0,time=10.0,axis=DR_AXIS_Z,ref=DR_TOOL)
wait(3)
set_digital_output(1, 1) # D-Out (no. 1 channel) ON
mwait(0) # Waits until the motion stops.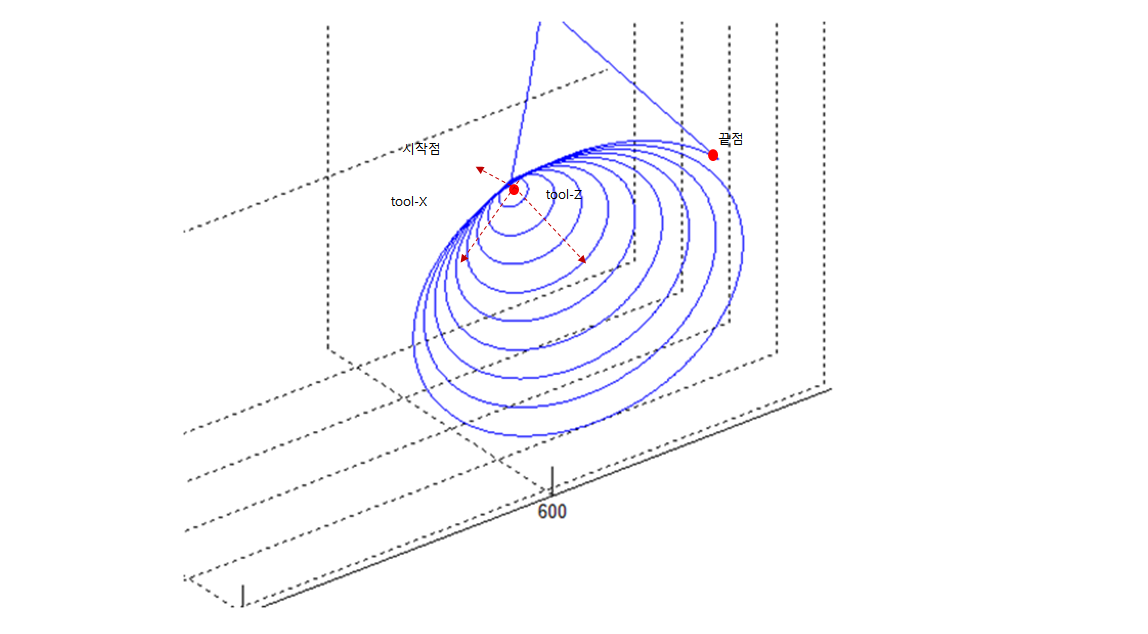
Related commands
- set_velx(vel1, vel2)
- set_velx(vel)
- set_accx(acc1, acc2)
- set_accx(acc)
- set_tcp(name)
- set_ref_coord(coord)
- mwait(time=0)
- move_spiral()