Safety Zone Overview (Valid for GF020400)
There are five types of Safety Zones.
Operating Space
Operating Space is a safety zone where robot operation is limited.
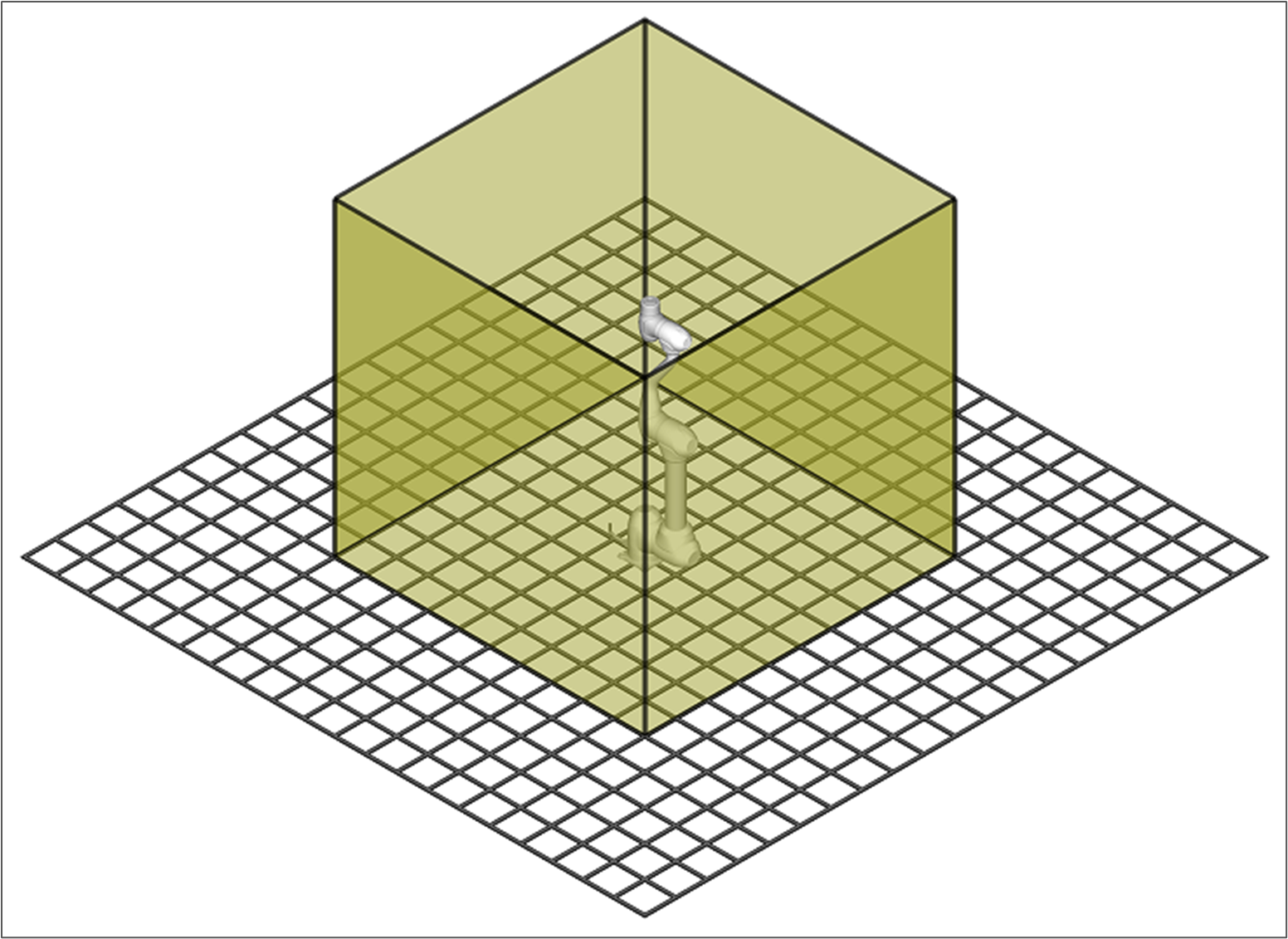
If any part of the robot including tool goes beyond the zone, a TCP_SLP violation error is invoked. It is geometrically defined as one of Cuboid, Circular Prism, and Planar Prism.
Collaborative Workspace
Collaborative Workspace is a safety zone where the user cooperates with the robot. Its complement is called Standalone Workspace, which is a space where the robot operates autonomously.
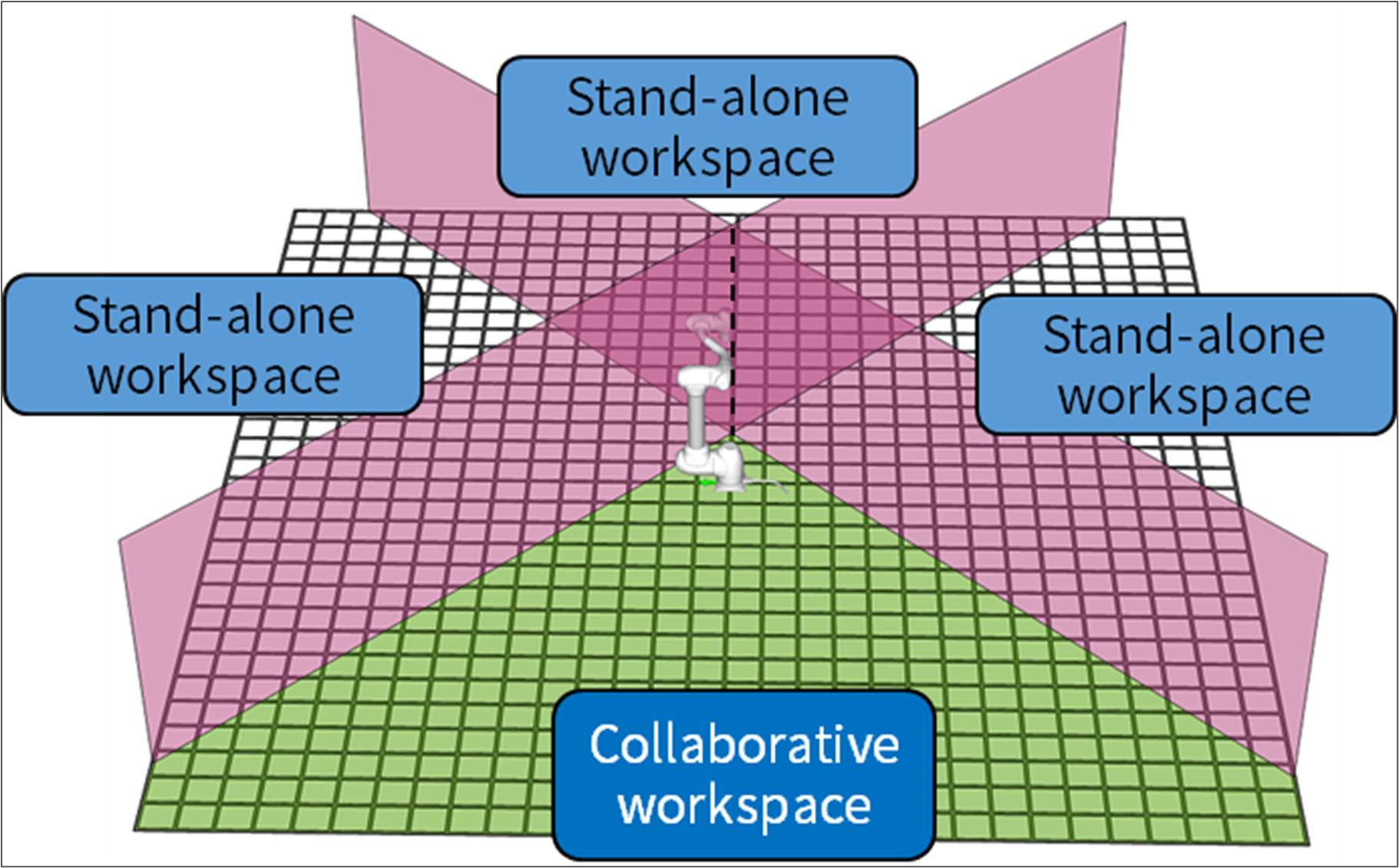
When the robot is moving in the autonomous mode and TCP is in Collaborative Workspace, the operation speed mode is changed to Reduced Speed Mode.
Protected Zone
Protected Zone is a safety zone to protect environmental objects near the robot.
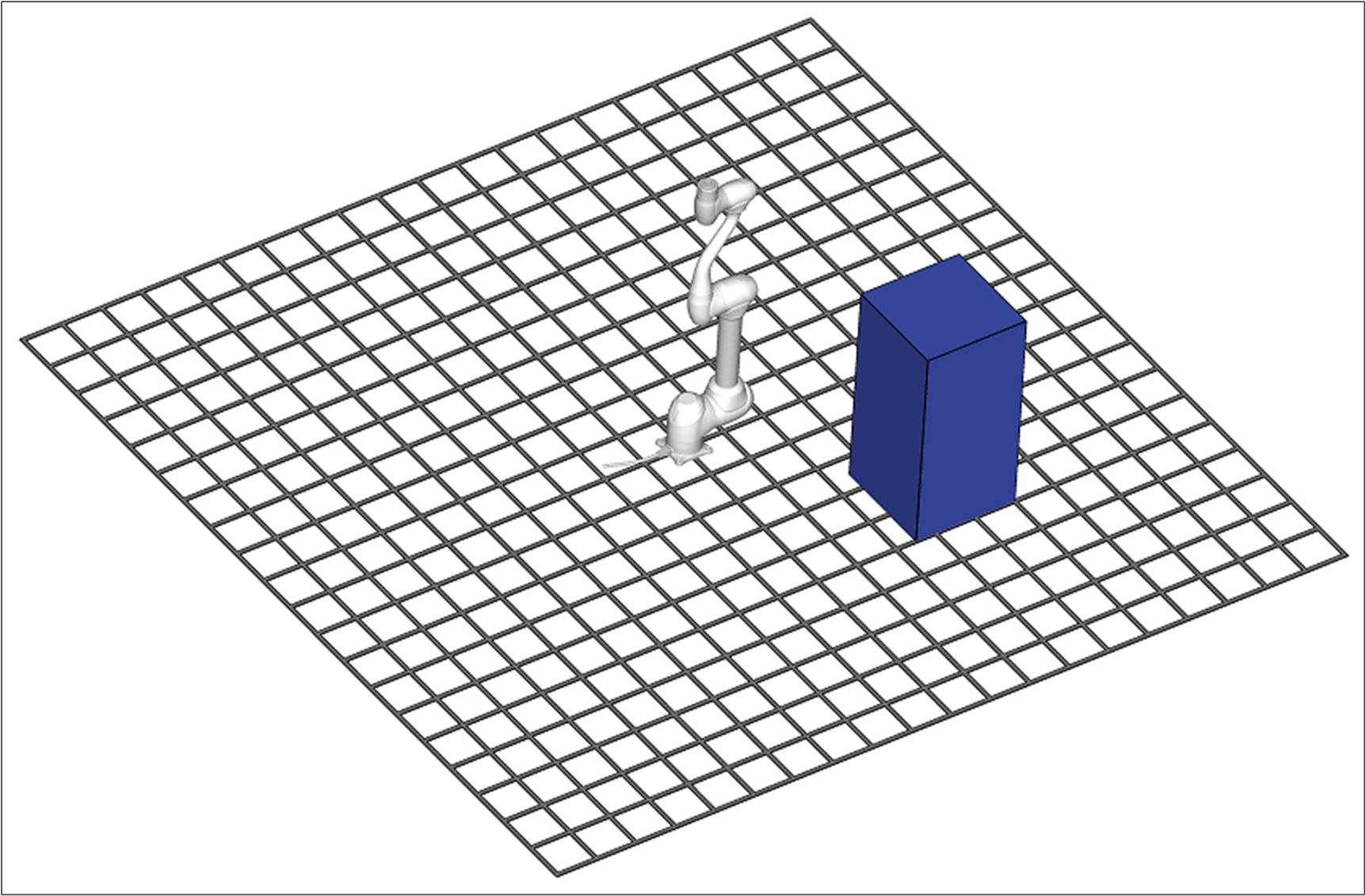
If any part of the robot including tool collides with the shape the zone defines, a TCP_SLP violation error is invoked. It is geometrically defined as one of Cuboid, Sphere, and Polygonal Prism.
Collision Detection Mute Zone
Collision Detection Mute Zone is a safety zone where collision detection is temporarily disabled, or local collision sensitivity is applied when TCP is inside the zone.
It is geometrically defined as one of Cuboid, Sphere, Cylinder, Tilted Cuboid and Polygonal Prism.
It has three zone properties.
- Collision Detection On/Off: If the property is OFF, Collision detection is disabled when TCP is inside the zone. If the property is ON, the local Collision Sensitivity property is applied to collision detection.
- Collision Sensitivity: Local collision sensitivity is applied to collision detection.
- Dynamic Zone Enable: If the property is set, the collision mute zone is only enabled when the corresponding safety input channel is enabled.
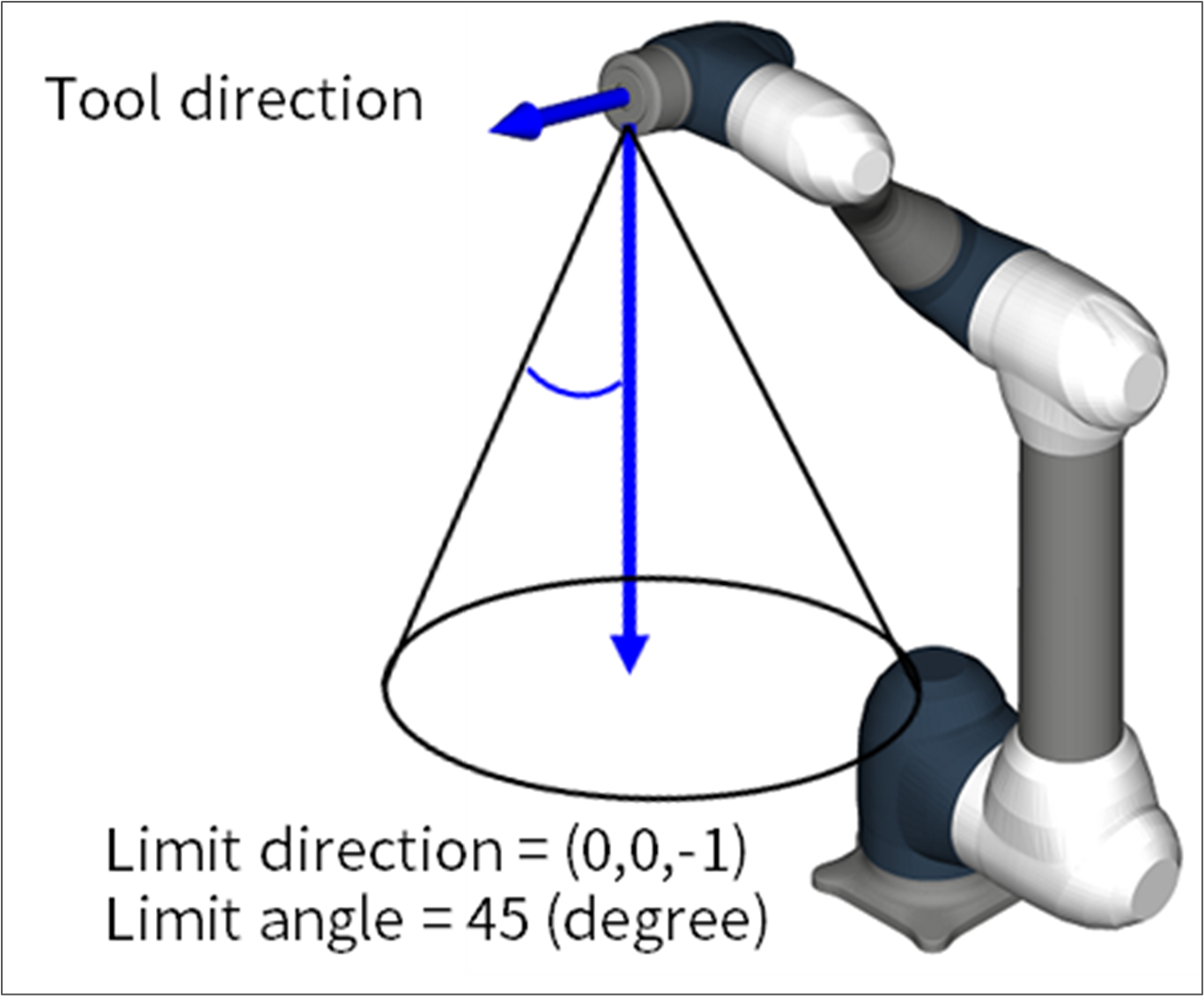
Tool Orientation Limit Zone
The tool orientation limit zone is a safety zone where tool direction is constrained when TCP is inside the zone. If the tool direction violates the limit condition, a TCP_SLO violation error is invoked.
It is geometrically defined as one of Cuboid, Sphere, Cylinder, Tilted Cuboid and Polygonal Prism.
It has two zone properties.
- Limit Direction: Violation Limit Direction based on global coordination.
- Limit Angle: Violation Limit Angle along Limit Direction.
Limit Direction and Angle comprise a cone shape. If the tool direction goes beyond the limit range, a TCP_SLO violation error is invoked.