
Recovery Motion
To change the robot pose in the fault situation, select Control on the main menu and click the Recovery Mode button.

If the button is clicked, the Recovery Motion window pops up. And then click the Start Recovery Mode button, servo on and the controller state changes to Recovery mode. And each control becomes active and can be controlled.
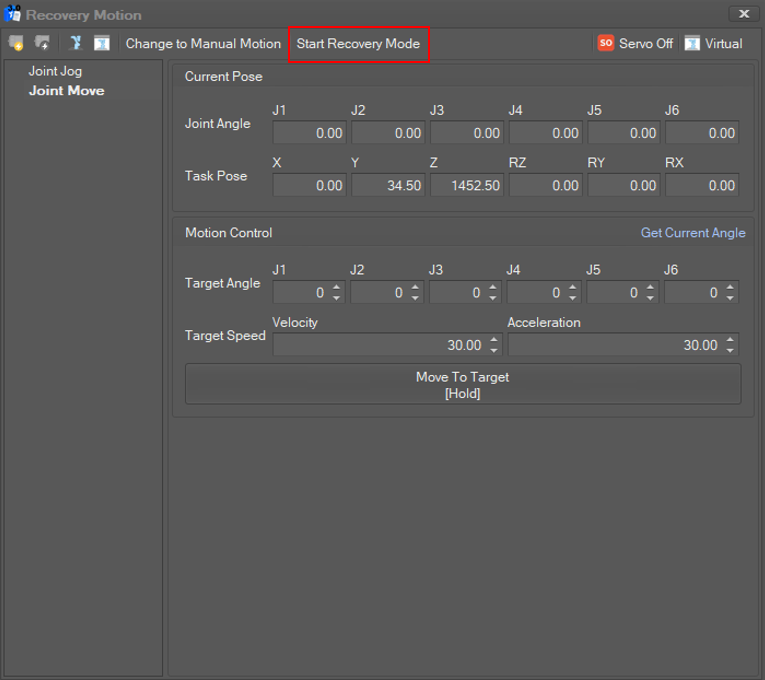
Recovery motion supports two types of manual motion, Joint Jog and Joint Move. Their use is the same as Manual Motion. For information about Joint Jog and Joint Move, refer to “Joint Jog” and “Joint Move.”
Caution
In recovery mode, no position violation inspection is performed. So, you can move the robot joint to its hardware limit.
You can visually check whether there is a position violation in the 3D viewer. If you ensure that there is no position violation, click the Change to Manual Motion button or just close the Recovery Motion window to go back to the manual mode.
Then, the system goes to the “Manual Standby” state.
