
Manual Motion
To control the robot motion manually, select Control on the main menu and click the Manual Motion button.
Joint Jog, Joint Move (MoveJ), Task Jog, Task Move (MoveL) and Align Motion are available in the Manual Motion window.
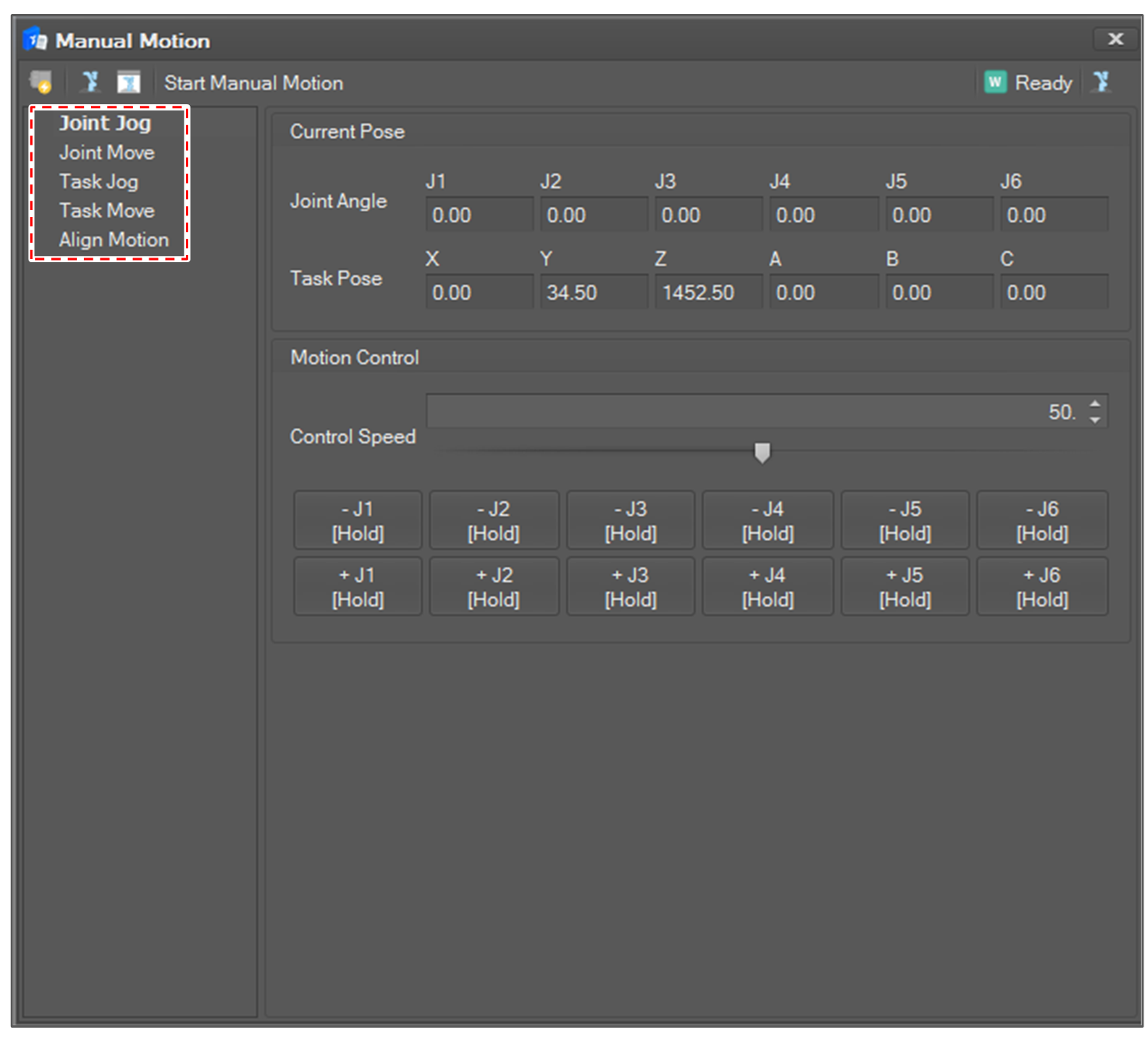
And then you can perform the servo on, change real / virtual mode using the button on the left upper side. It is also possible to see the current control state and system mode in the right upper side.
All manual motions are run by the user’s Hold To Run operation. Hold To Run means that the robot moves only when the operation button is pushed. If the button is released, the robot stops immediately.
In motion control, every joint angle value is displayed in degree units and its speed is displayed in degree/second units. For task pose, the translation part (X, Y, Z position) is displayed in mm units and orientation part (A, B, C orientation) is displayed in degree units. For task speed, the speed of the translation part is displayed in mm/second units and speed of the orientation part is displayed in degree/second units.