
Create Path
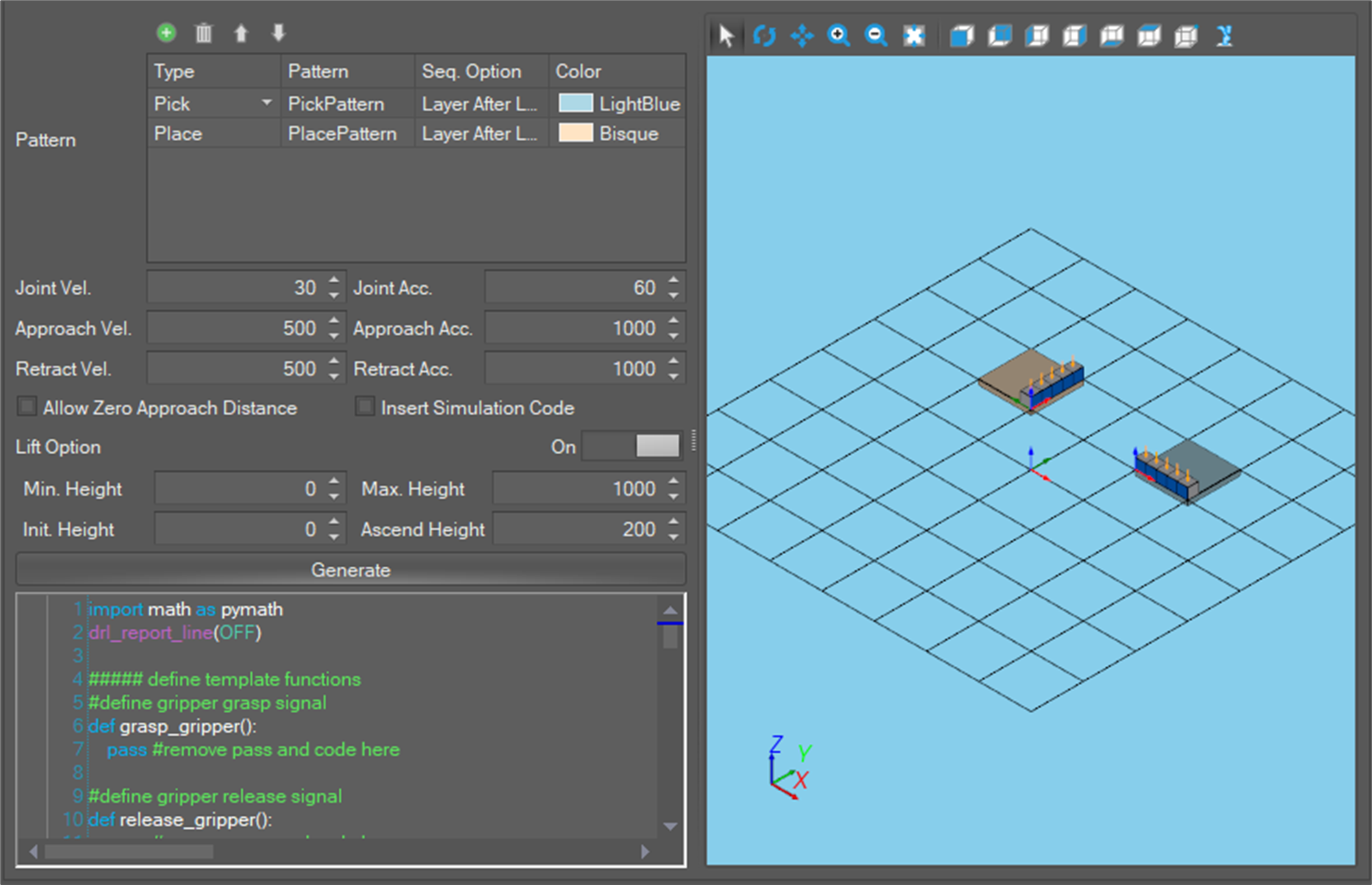
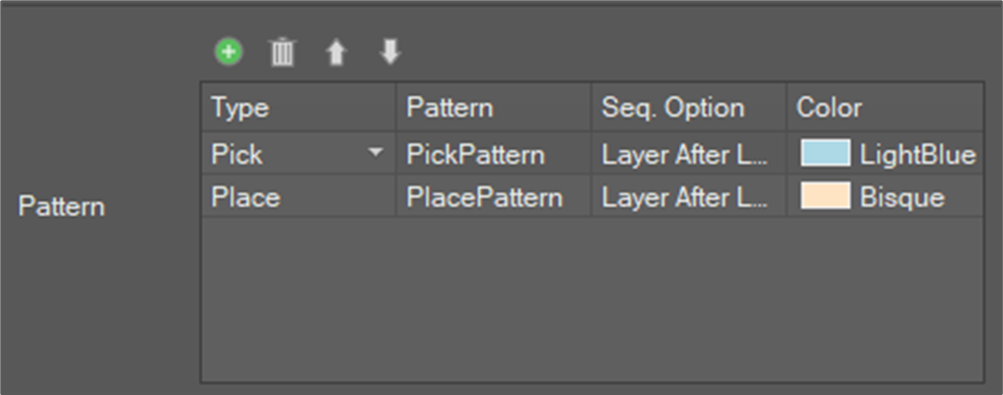
It is possible to create a path based on the created pattern and calibration. During creation, DRL code is generated as shown above. Multiple grasp and release patterns can be set for use. It is possible to select whether to execute based on the layer or height.
The rate of movement between patterns can be configured with Joint Speed and Acceleration, and the working speed for approaching and retreating in the pattern varies according to the task speed.
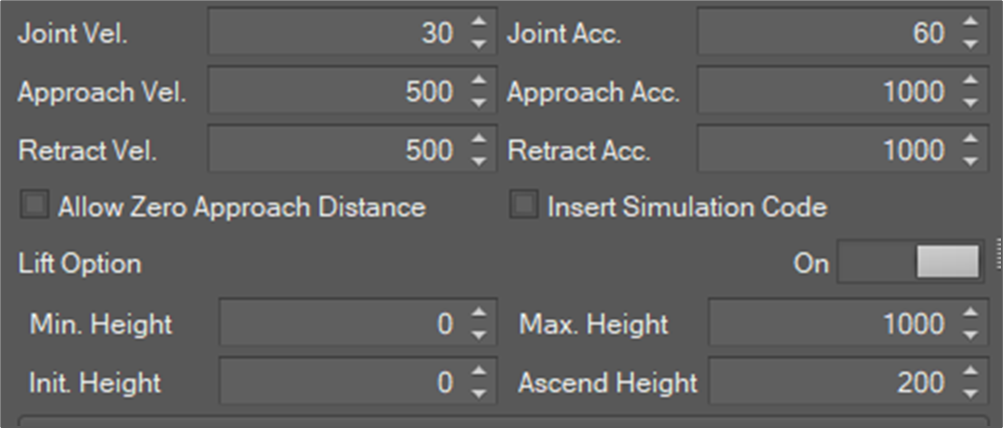
Allow Approach Distance 0 option is available when approach/retreat directions are not used, and Insert Simulation Code enables logging for checking simulation logs. Lift option can add the height adjustment function when the T-axis is added. Create Script creates a pallet path based on the settings above.
It is possible to run the generated script by copying (CTRL+C) and pasting (CTRL+V) from DRL editor of the Task Manager. In addition, the DRL code can be directly applied to the Teach Pendant by inserting it into the custom code on the TB/TW using the “Upload to Smart TP” button in the Task Manager.