
Safety Zone Overview (Valid from GF020500)
Safety zone is unified as two types of zone, Space limit zone and Local zone.
Space Limit Zone
Space limit zone is a safety zone which limits operation of the robot. It unified the Operating space and the Protection zone of the previous version.
The shape of a zone is geometrically defined as one of Sphere, Cylinder, Cuboid, Tilted Cuboid and Multi Plane. The properties of each shape is as below.
| Type | Image | Property |
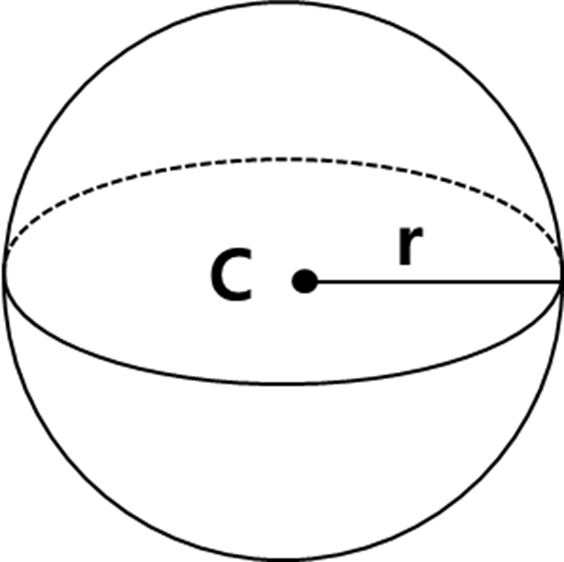
Sphere |
| C: Center Point (X, Y, Z) r: Radius |
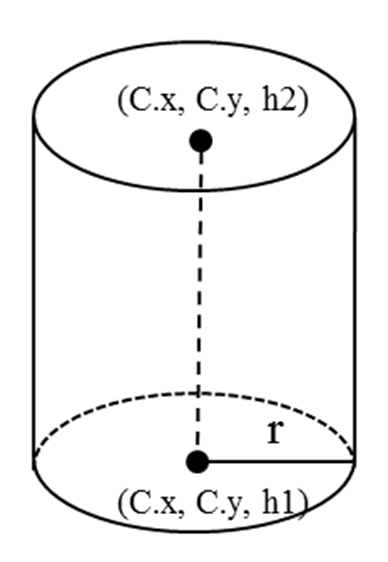
Cylinder |
| C: Center Point (X, Y) r: Radius h1: Lower Height (Z) h2: Upper Height (Z) |
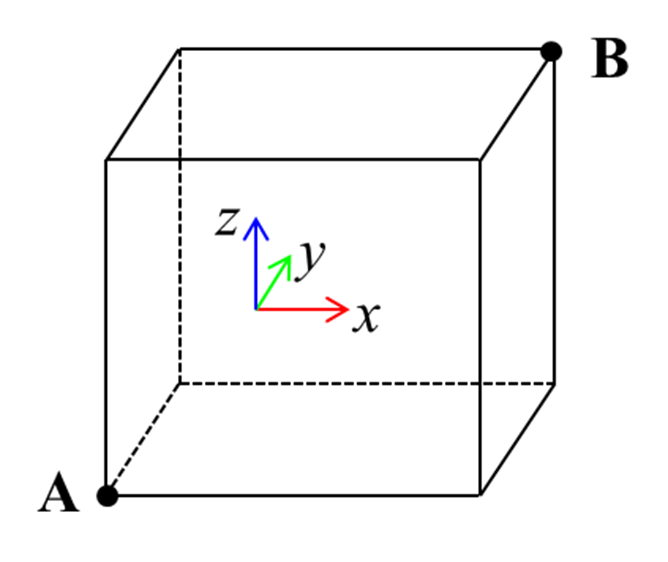
Cuboid |
| A: Vertex Point 1 (X, Y, Z) B: Diagonal Vertex Point of A (X, Y, Z) |
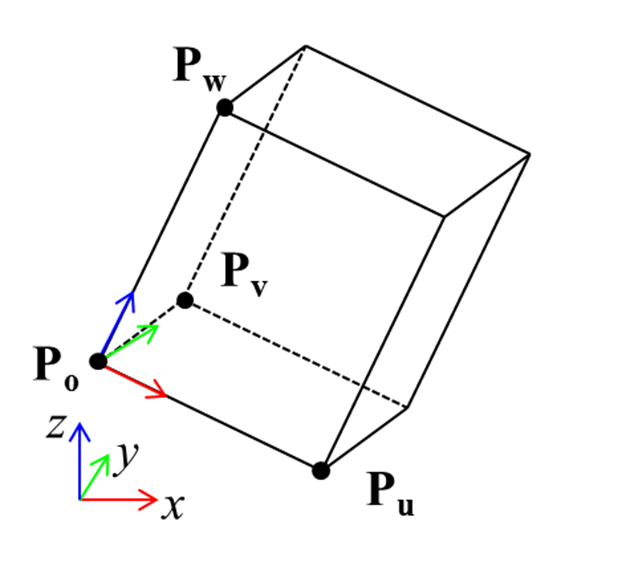
Tilted Cuboid |
| Tilted cuboid is defined as an origin point and three orthogonal vertex points. Po: Origin Point (X, Y, Z) Pu: Vertex point along U axis (X, Y, Z) Pv: Vertex point along V axis (X, Y, Z) Pw: Vertex point along W axis (X, Y, Z) |
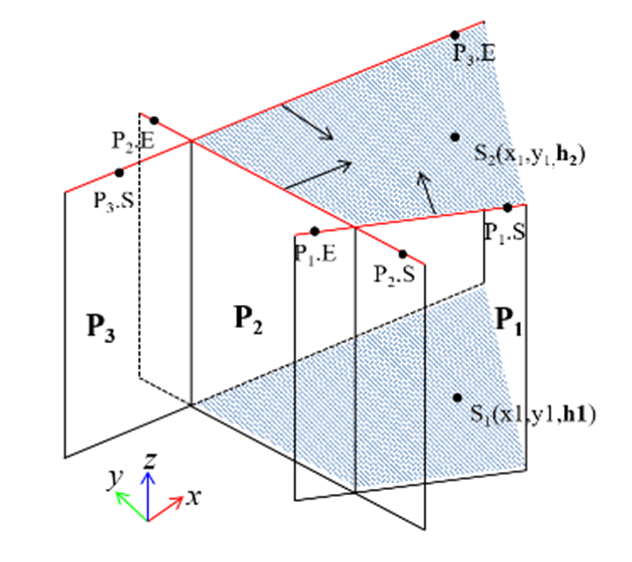
Multi Plane |
| P1~P6: A plane orthogonal to XY plane. Defined as start and end points on XY plane. h1: Lower Height (Z) h2: Upper Height (Z) S: Space point(X, Y). The Space point decides a valid space among spaces divided by planes. |
Shapes have common properties as below.
Property | Description |
Coordinate | If defines the coordinate system of the position of the shape. It is one of Base coordinate system or World coordinate system. |
Valid space | A shape divide the space into inner space and outer space. The user can select which space is valid. If the outer space is valid, the robot cannot reside inside the shape which means that it defines a protection zone. |
Margin | Margin means an offset value to expand or shrink the shape. If it is positive value, the shape is expanded. Or if it is negative value, the shape is shrunk. |
The properties of a zone is as below:
Property | Description |
Inspection Type | If defines space limit violation inspection type. Body: Robot shape volumes are used to decide whether the robot reside inside space limit. TCP: Robot TCP is used to decide whether the robot reside inside space limit. |
Joint Angle Limit Override | It defines whether to override joint angle limit inside the zone. |
Dynamic Enable By Safety Input | It defines whether to dynamically enable the zone based on the safety input signal. If the option is enabled, the safety zone is enabled when the assigned safety input channel is invoked |
Dynamic Enable By Safety Output | It defines whether to dynamically enable the zone based on the safety output signal. If the option is enabled, the safety zone is enabled when the assigned safety output channel is invoked |
Local Zone
Local zone is a safety zone which overrides safety parameters when TCP is inside the zone.
The shape of a zone is geometrically defined as one of Sphere, Cylinder, Cuboid, Tilted Cuboid and Multi Plane. The properties of each shape are as described in Space Limit Zone.
The properties of a zone is as below:
Property | Description |
Prior to other zones | It decides the priority of zones when local zones are overlapped. If this flag is enabled, the zone is prior to other zones. |
Prior to Reduced mode | If the reduced speed mode safety input is invoked while the robot is operating in Auto mode, the safer limit between global reduced speed mode limit and the local safety limit is applied. If this flag is enabled, the local safety limit is applied. |
Joint Angle Limit Override | It defines whether to override joint angle limit inside the zone. |
Joint Speed Limit Override | It defines whether to override joint speed limit inside the zone. |
TCP Speed Limit Override | It defines whether to override TCP speed limit inside the zone. |
Power Limit Override | It defines whether to override Power limit inside the zone. |
Momentum Limit Override | It defines whether to override Momentum limit inside the zone. |
TCP Force Limit Override | It defines whether to override Force limit inside the zone. |
Collision Sensitivity Override | It defines whether to override Collision sensitivity inside the zone. |
TCP SLF Violation Stop Mode Override | It defines whether to override TCP SLF Violation Stop Mode inside the zone. |
COLLISION Violation Stop Mode Override | It defines whether to override COLLISION Violation Stop Mode inside the zone. |
Speed Rate Override | It defines the operation speed rate inside the zone. |
Tool Orientation Limit | It defines whether to limit the tool orientation inside the zone. To limit the tool orientation, the limit axis and the angle should be defined. |
Collaborative Zone Enable | It defines whether to collaborative zone enable. |
Dynamic Enable By Safety Input | It defines whether to dynamically enable the zone based on the safety input signal. If the option is enabled, the safety zone is enabled when the assigned safety input channel is invoked |
Dynamic Enable By Safety Output | It defines whether to dynamically enable the zone based on the safety output signal. If the option is enabled, the safety zone is enabled when the assigned safety output channel is invoked |
Caution
The safety violation inspection criterion is decided based on rules below.
1) Manual mode or hand-guiding mode:
The global reduced speed mode limit is applied. The safety limit of the local zone is ignored.
2) Normal speed Auto mode:
If the TCP is inside the zone, the safety limit of the local zone is applied.
3) Reduced speed Auto mode:
If the reduced speed mode safety input is invoked while the robot is operating in Auto mode, the safer limit between global reduced speed mode limit and the local safety limit is applied.
If the ‘Prior to reduced mode’ is enabled, the local safety limit is applied.