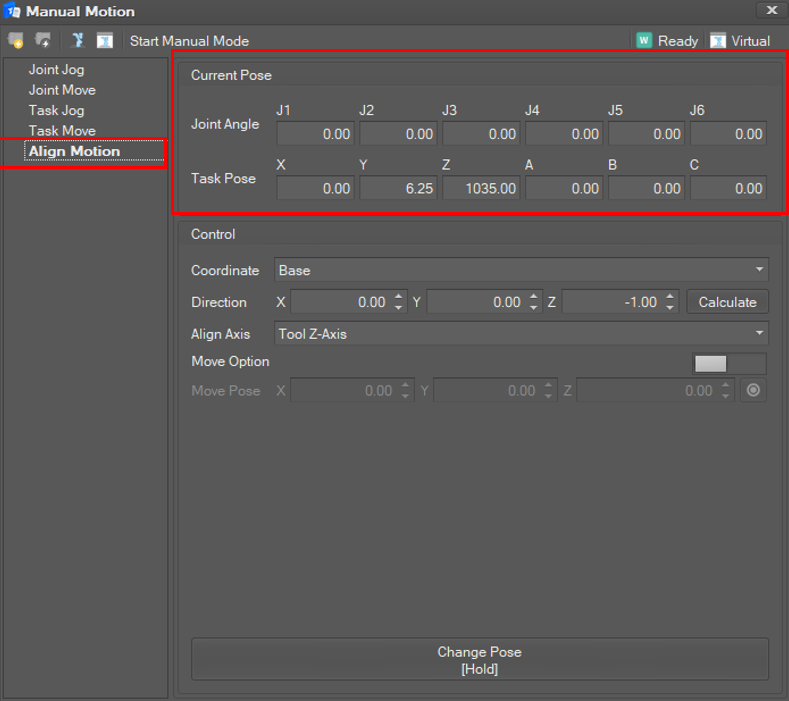
Align Motion
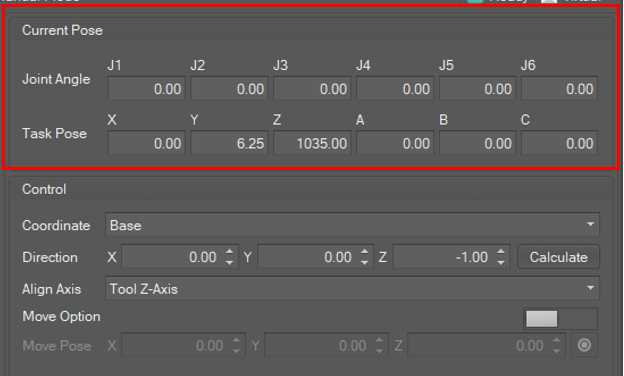
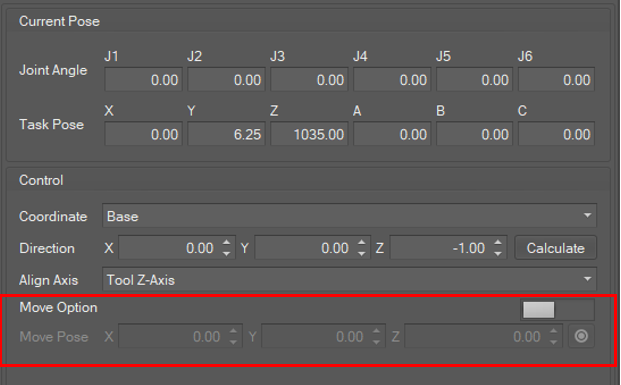
Select Align Motion in the Manual Motion list. Then, the current joint angles and TCP position are displayed and updated in 100 milliseconds.
Set Plane Points
Set three plane points to decide the alignment direction. The alignment direction is the normal vector of the plane that the three plane points define.
To get the current pose, click the corresponding Get Pose button.
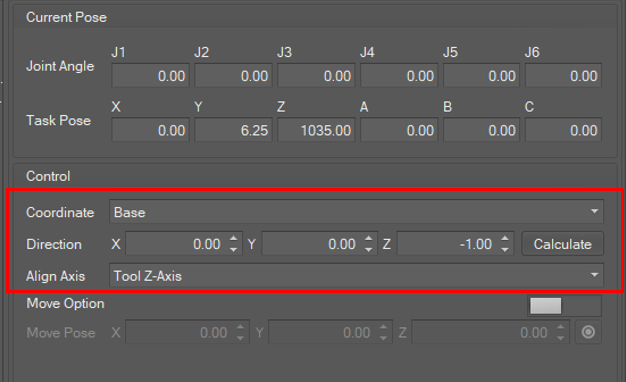
Select Alignment axis
Select the tool axis to align. If you select Tool Z-Axis, the tool’s z axis will align to the alignment direction. If you select Tool X-Axis, the tool’s x axis will align to the alignment direction.
The reference coordinate system of the alignment direction is the coordinate system set in Coordinate.
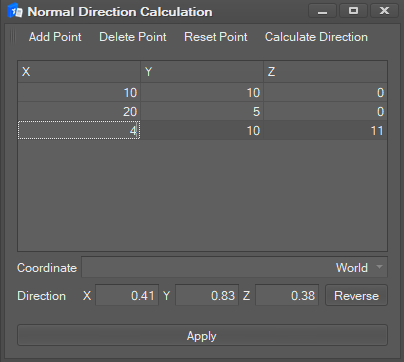
Pressing the Calculate button brings up a dialog that provides a normal direction calculation function.
Three planar points must be entered to calculate the direction.
The alignment direction is the normal direction of the three points.(V = (P2-P1) X (P3-P1) )
When a plane point is entered, the calculated normal direction is displayed. If the direction vector is not valid, an error message is displayed.
If two of the three points are the same point or are on a straight line, an error is not returned and (0,1,0) is returned.
Select Target Coordinate Movement (Optional)
If the Target Coordinate Movement switch is on, the robot will move to the target position while changing the orientation of the tool. If the Target Coordinate Movement switch is off, the robot will change the orientation of the tool without changing the position.
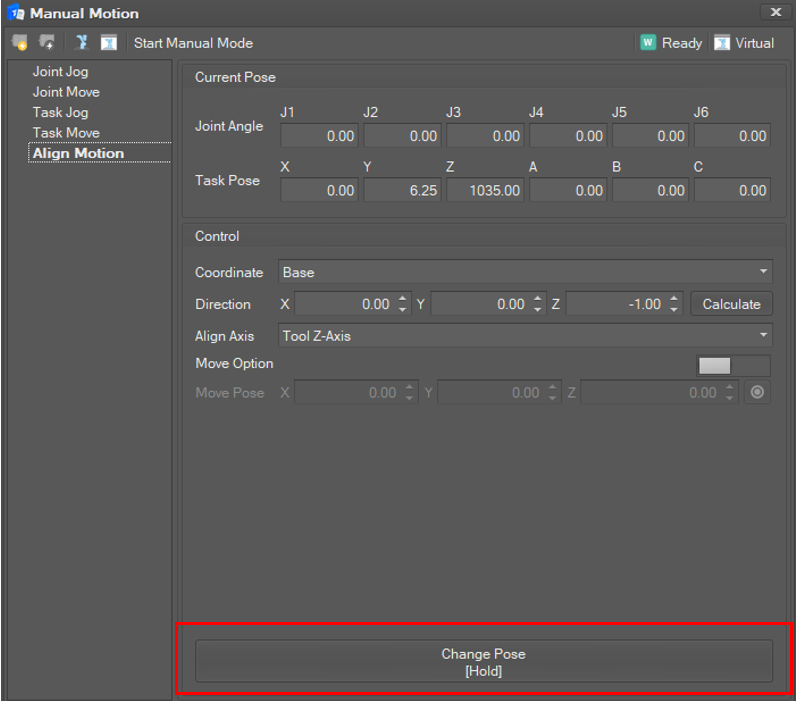
Start Motion
If you click and hold the Move To Align button, the robot will change its tool direction until you release the button.