
Gripper DA (Double Acting)
This is a gripper that operates with two digital IO signals.
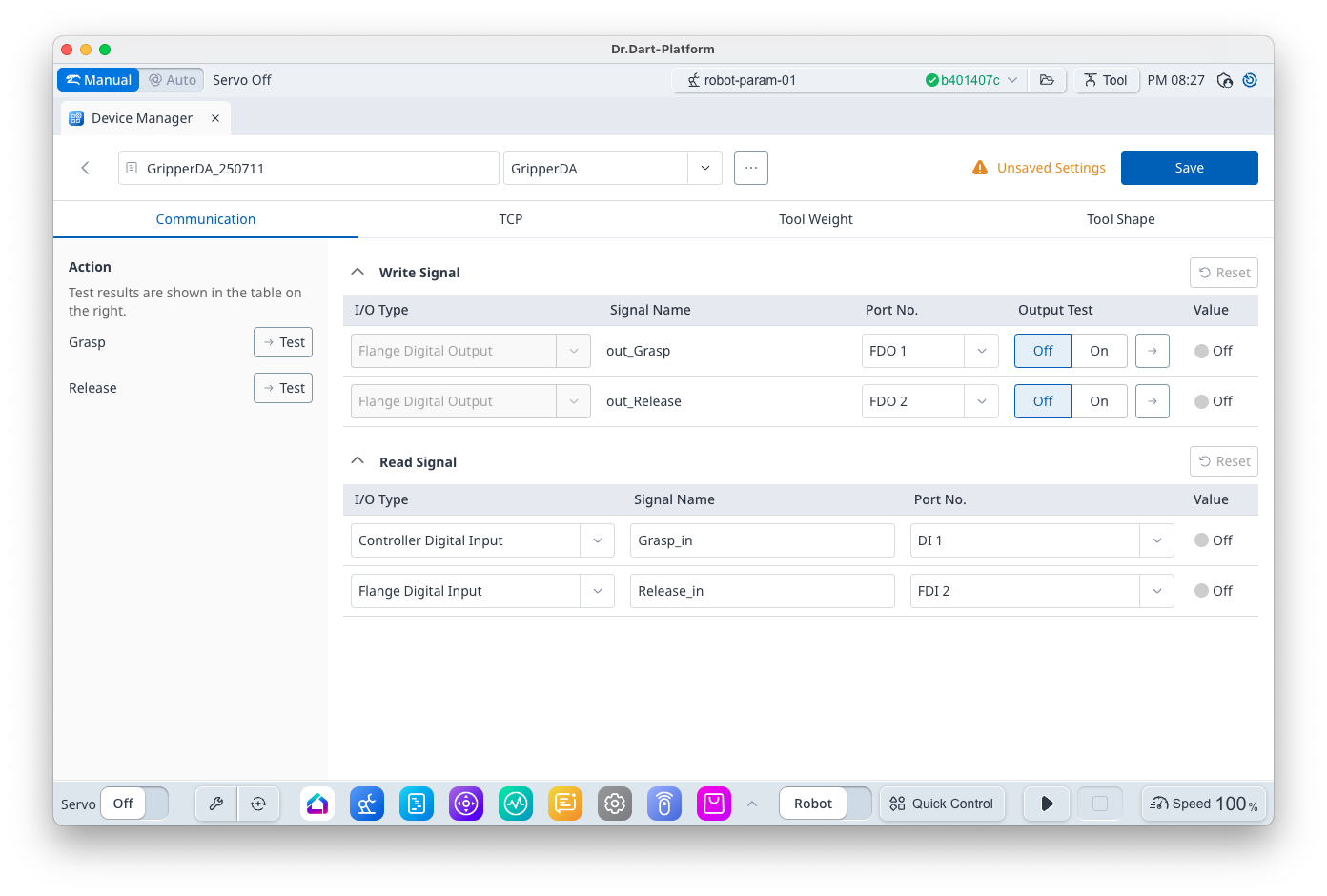
It can only be operated with the Flange Digital Output signals.
Signal Setting
Item | Description |
|---|---|
out_Grasp | This sets the output signal for grasping the target. A motion is executed when the grasp output signal is on and the release output signal is off. |
out_Release | This sets the output signal for releasing the target. A motion is executed when the release output signal is on and the grasp output signal is off. |
Grasp_in | This configures an input signal that checks whether the grasping of the target is complete. This item is optional. |
Release_in | This configures an input signal that checks whether the releasing of the target is complete. This item is optional. |
Support Action (DRL)
Item | Description |
|---|---|
Grasp | [Mandatory Action] It performs a grasp motion with the out_Grasp signal on and the out_Release signal off. |
Release | [Mandatory Action] It performs a release motion with the out_Release signal on and the out_Grasp signal off. |