
Copy Skill
Place Skill can be made by editing Pick Skill that you have made so far. Save and copy the ‘Sample_Pick’ Skill you have prepared to make the Place Skill.
- Click ‘Confirm’ button to save the Skill.

- You can check the Skill list as follow.
Select the Skill from Skill list to copy and edit.
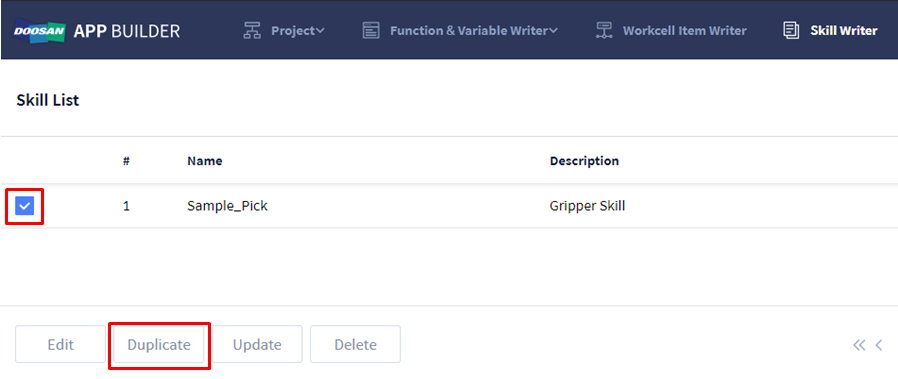
- Select the check box of ‘Sample_Pick’ skill.
- Click ‘Duplicate’ button’ from the bottom menu.
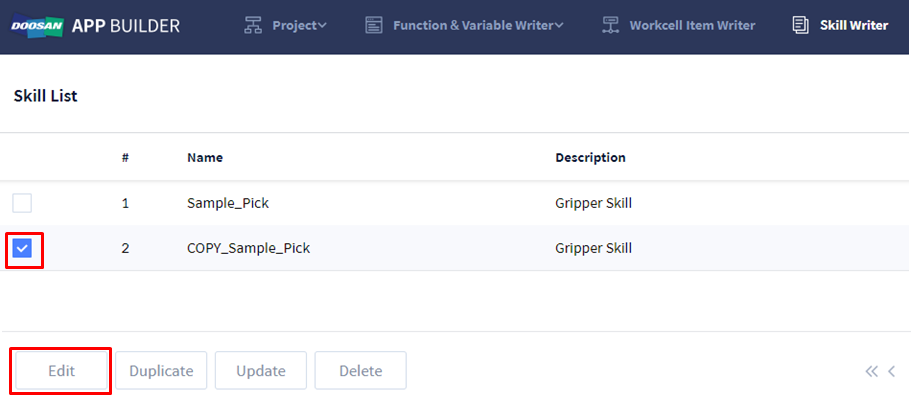
- Select the check box of the ‘COPY_Sample_Pick’ skill copied.
- Click ‘Edit’ button from the bottom menu.
Edit ‘Skill Info’ from ‘General Info’ tab as below.
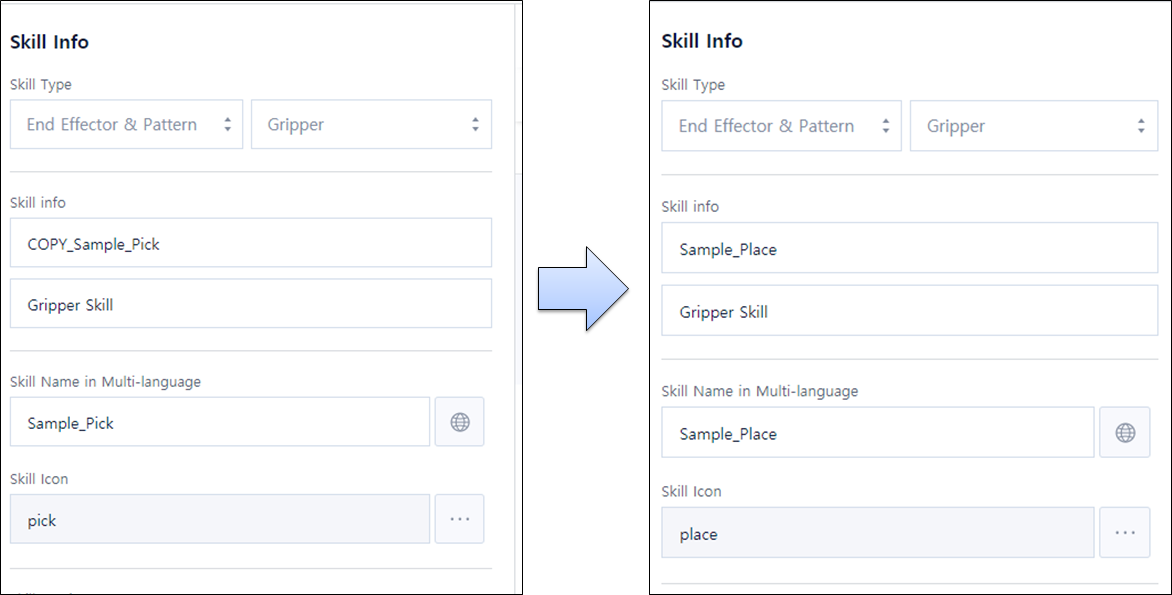
- Skill info: COPY_Sample_Pick → Sample_Place
- Skill Name in Multi-language: Sample_Pick → Sample_Place
- Skill Icon: pick → place
- Go to ‘Skill Setting’ tab.

- You need to edit UI Component to change it into the screen configuration used in Place skill. Remove the Toggle Switch (Gripper Release) not used in Sample Place.
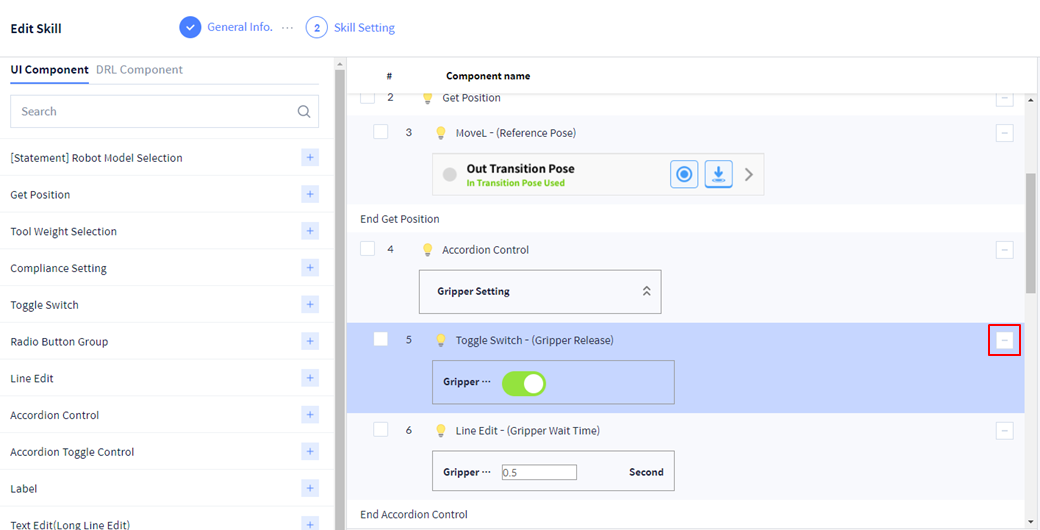
- Click
 button on the right side of the Toggle Switch to remove the UI Component.
button on the right side of the Toggle Switch to remove the UI Component.
- Click
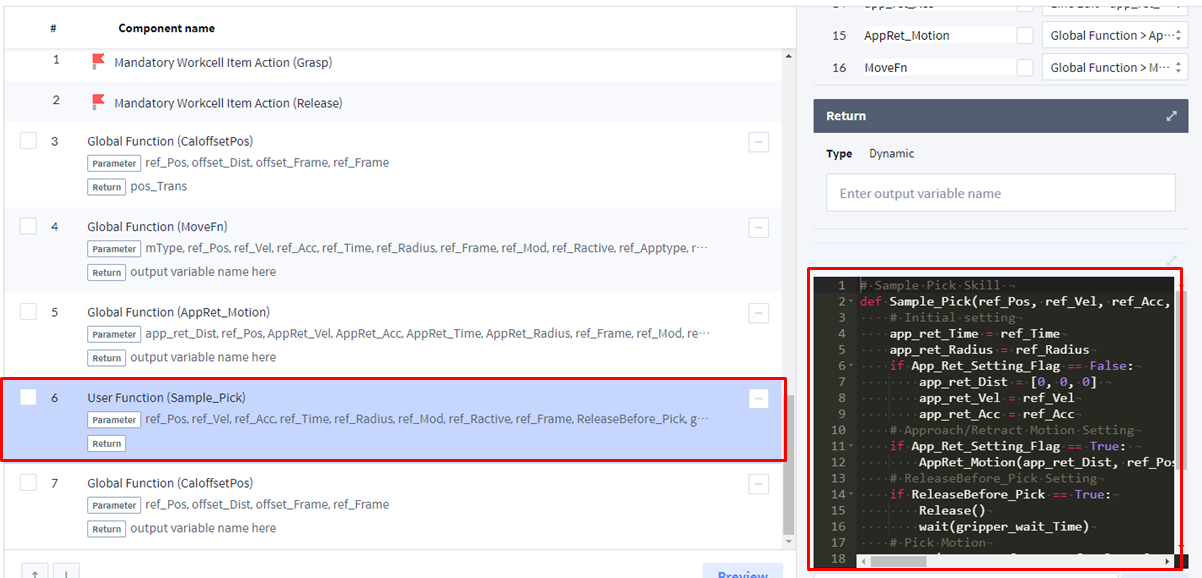
You need to edit DRL Component to change it into the skill action method used in Place skill. Change the ‘Sample_Pick’ code of ‘User Function’ to ‘Sample_Place’ code as below. The Pick function planned in Skill Planning is implemented as a User Function.
Sample_Place
PY# Sample Place Skill def Sample_Place(ref_Pos, ref_Vel, ref_Acc, ref_Time, ref_Radius, ref_Mod, ref_Ractive, ref_Frame, gripper_wait_Time,TCP_Setting_Flag, TCP_Name, App_Ret_Setting_Flag, app_ret_Dist, app_ret_Vel, app_ret_Acc, AppRet_Motion, MoveFn): # Initial setting if TCP_Setting_Flag == True: set_tcp(TCP_Name) app_ret_Time = ref_Time app_ret_Radius = ref_Radius ref_Apptype = None ref_Sol = None if App_Ret_Setting_Flag == False: app_ret_Dist = [0, 0, 0] app_ret_Vel = ref_Vel app_ret_Acc = ref_Acc # Approach/Retract Motion Setting if App_Ret_Setting_Flag == True: AppRet_Motion(app_ret_Dist, ref_Pos, app_ret_Vel, app_ret_Acc, app_ret_Time, app_ret_Radius, ref_Frame, ref_Mod, ref_Ractive, CaloffsetPos, MoveFn) # Place Motion MoveFn(mType, ref_Pos, ref_Vel, ref_Acc, ref_Time, ref_Radius, ref_Frame, ref_Mod, ref_Ractive, ref_Apptype, ref_Sol, sync_Mode) Release() wait(gripper_wait_Time) # Retract/Retract Motion Setting if App_Ret_Setting_Flag == True: AppRet_Motion(app_ret_Dist, ref_Pos, app_ret_Vel, app_ret_Acc, app_ret_Time, app_ret_Radius, ref_Frame, ref_Mod, ref_Ractive, CaloffsetPos, MoveFn)