Skill Planning
Users need to plan the screen configuration and the sequence of the robot’s action before preparing the skill.
- Plan the user input screen and select the UI Component
- Action Sequence Planning
Plan the user input screen and select the UI Component
It is an example of planning the user input screen and selecting the UI component of ‘Sample_Pick’ skill.
| Category | Name | Function | UI Component |
|---|---|---|---|
| Basic Setting | Reference Pose | Reference Pose |
|
| Gripper Setting | Gripper Release (Option) | Gripper Action Option |
|
| Gripper Wait Time | Gripper Wait Time |
| |
| Set TCP (Option) | TCP option |
| |
| Approach/Retract Pose Setting (Option) | Approach/Retract Distance | Enter the distance from the reference pose |
|
| Velocity for Approach/Retract Pose | Enter the velocity to the point away from the reference pose |
| |
| Acceleration for Approach/Retract Pose | Enter the acceleration to the point away from the reference pose |
|






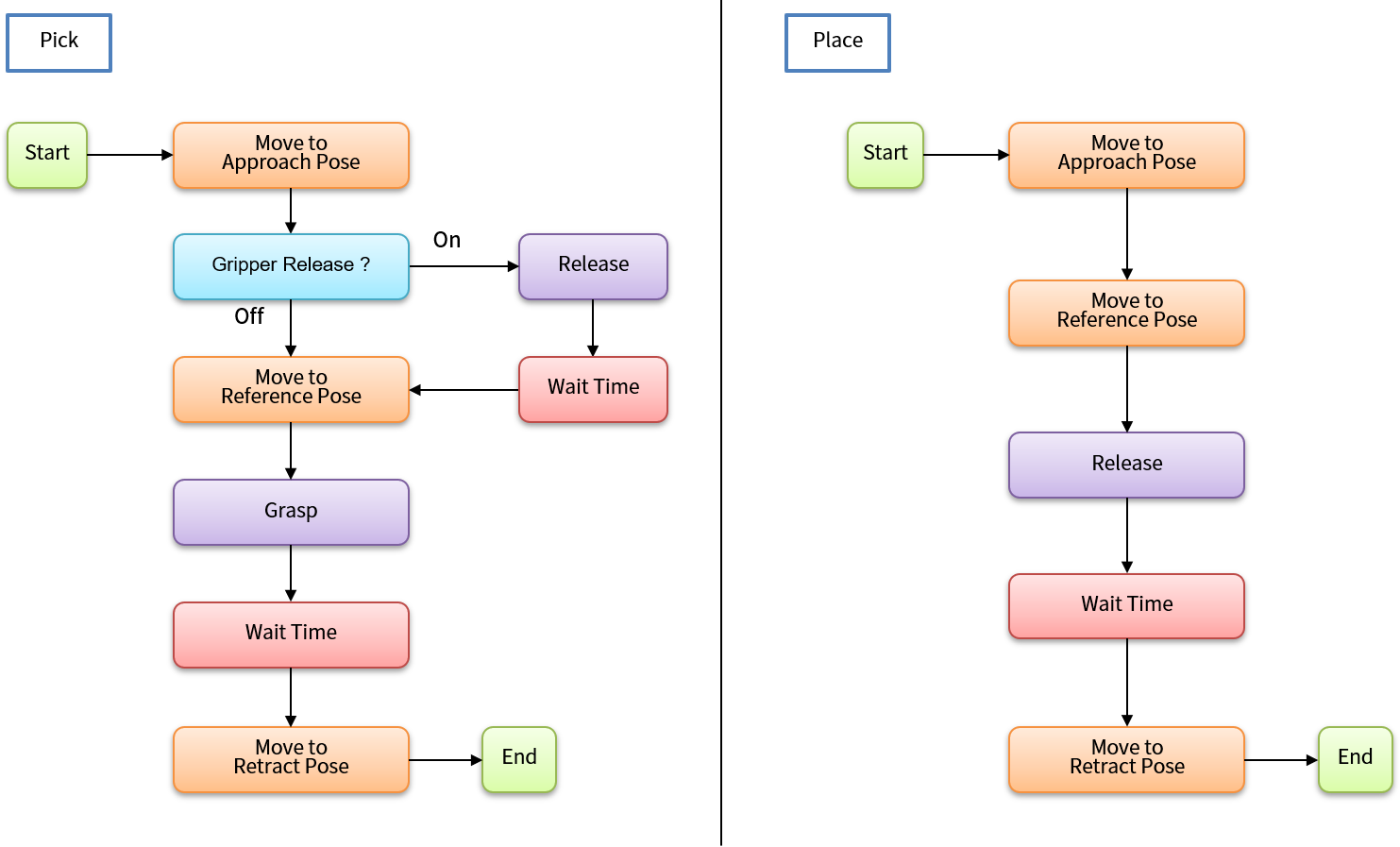
Action Sequence Planning
The following is an example of preparing a flow chart on the action of the ‘Sample_Pick’ and ‘Sample_Place’ Skills.