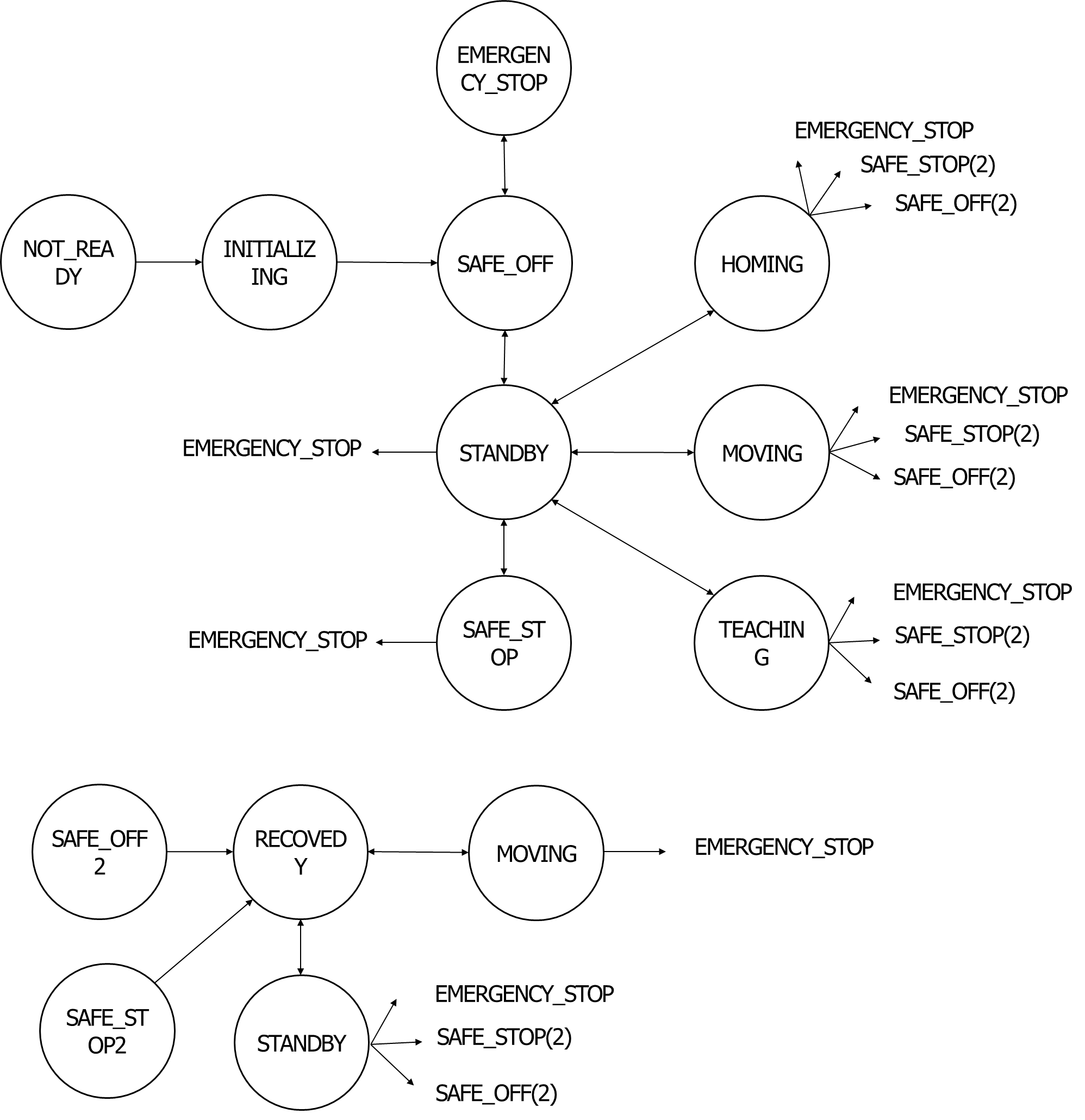
Robot state transition
The command standby state (STATE_STANDBY) is a basic robot control preparation state, and it carries out motions by automatically converting into STATE_HOMING, STATE_MOVING, or STATE_TEACHING when a control command is received from the user, and if the motion is done without error, it converts again into STATE_STANDBY and waits for user commands.
The EMERGENCY_STOP state is converted by the E/M button in whatever states excluding the initialization state (STATE_INITIALIZING) and robot stops. When an internal function or motion error of the robot controller occurs, it is converted into the SAFE_OFF state (motor and brake power cut-off) or SAFE_STOP state (control stop) and the robot stops.
Also, the functions for which state should be converted directly by the user for safety are as follows, and these functions can be executed by the set_robot_control function.
Rank | Robot state control command | Description |
|---|---|---|
0 | CONTROL_INIT_CONFIG | It executes the function to convert from STATE_NOT_READY to STATE_INITIALIZING, and only the T/P application executes this function. |
1 | CONTROL_ENABLE_OPERATION | It executes the function to convert from STATE_INITIALIZING to STATE_STANDBY, and only the T/P application executes this function. |
2 | CONTROL_RESET_SAFET_STOP | It executes the function to convert from STATE_SAFE_STOP to STATE_STANDBY. Program restart can be set in the case of automatic mode. |
3 | CONTROL_RESET_SAFET_OFF | It executes the function to convert from STATE_SAFE_OFF to STATE_STANDBY. |
4 | CONTROL_RECOVERY_SAFE_STOP | It executes the S/W-based function to convert from STATE_SAFE_STOP2 to STATE_RECOVERY. |
5 | CONTROL_RECOVERY_SAFE_OFF | It executes the S/W-based function to convert from STATE_SAFE_OFF2 to STATE_RECOVERY. |
6 | CONTROL_RECOVERY_BACKDRIVE | It executes the H/W-based function to convert from STATE_SAFE_OFF2 to STATE_RECOVERY. It cannot be converted into STATE_STANDBY, and robot controller power should be rebooted. |
7 | CONTROL_RESET_RECOVERY | It executes the function to convert from STATE_RECOVERY to STATE_STANDBY. |
SAFE_OFF is generally converted into the command standby state (STATE_STANDBY) by the RESET_SAFE_OFF command, which corresponds to servo on, SAFE_STOP is converted into the command standby state (STATE_STANDBY) by RESET_SAFE_STOP user command. Also, when an error that exceeds the robot limit threshold occurs, it is converted into SAFE_OFF2 (motor and brake power cut-off) or SAFE_STOP2 (control stop). In this case, the state should be converted into the command standby state (STATE_STANDBY) by the RESET_RECOVERY command after moving the robot inside the limit threshold to execute robot control normally without the occurrence of errors.