
CDRFLEx.movej
Features
This is a function for moving the robot from the current joint location to target joint location in the robot controller.
Parameter
Parameter Name | Data Type | Default Value | Description |
fTargetPos | float[6] | - | Target joint location for six axes |
fTargetVel | float | - | Velocity |
fTargetAcc | float | - | Acceleration |
fTargetTime | float | 0.f | Reach Time [sec] |
eMoveMode | enum.MOVE_MODE | MOVE_MODE_ ABSOLUTE | Refer to the Definition of Constant and Enumeration Type |
fBlendingRadius | float | 0.f | Radius for blending |
eBlendingType | enum.BLENDING_SPEED_TYPE | BLENDING_SPEED_ TYPE_DUPLICATE | Refer to the Definition of Constant and Enumeration Type |
Note
- When fTargetTime is specified, fTargetVel and fTargetAcc are ignored, and the process is done based on fTargetTime .
Caution
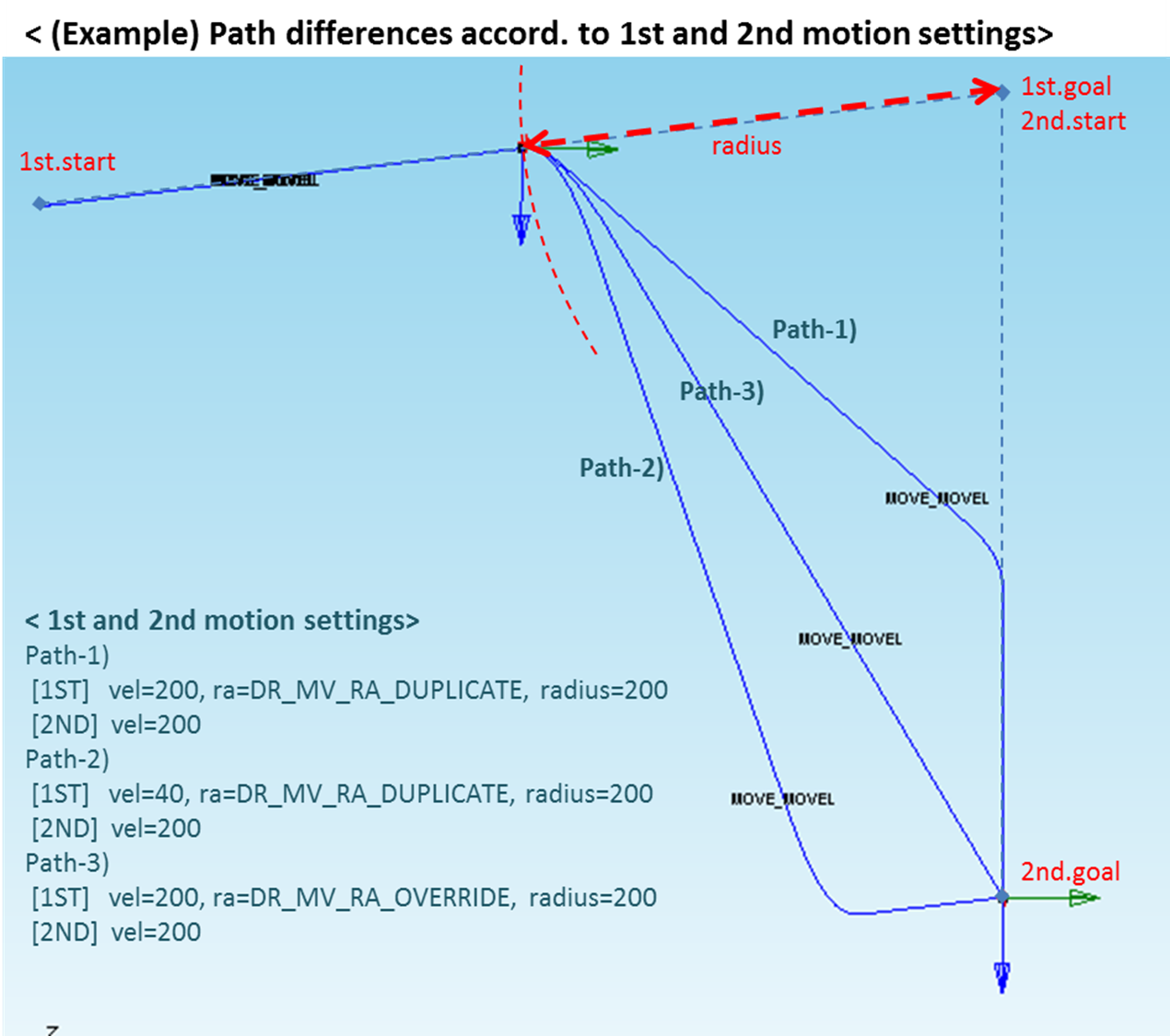
If the following motion is blended with the conditions of eBlendingType being BLENDING_SPEED_TYPE_DUPLICATE and fBlendingRadius>0, the preceding motion can be terminated after the following motion is terminated first when the remaining motion time, which is determined by the remaining distance, velocity, and acceleration of the preceding motion, is greater than the motion time of the following motion. Refer to the following image for more information.
Return
Value | Description |
0 | Error |
1 | Success |
Example
// CASE 1
float q0[6] = { 0, 0, 90, 0, 90, 0 };
float jvel=10;
float jacc=20;
drfl.movej(q0, jvel, jacc);
# Move to the q0 joint angle with velocity 10(deg/sec) and acceleration 20(deg/sec2)
// CASE 2
float q0[6] = { 0, 0, 90, 0, 90, 0 };
float jTime=5;
drfl.movej(q0, 0, 0, jTime)
# Moves to the q0 joint angle with a reach time of 5 sec.
// CASE 3
float q0[6] = { 0, 0, 90, 0, 90, 0 };
float q1[6] = {90, 0, 90, 0, 90, 0 };
float jvel=10;
float jacc=20;
float blending_radius=50;
drfl.movej(q0, jvel, jacc, 0, MOVE_MODE_ABSOLUTE, blending_radius);
// Moves to the q0 joint angle and is set to execute the next motion
// when the distance from the location that corresponds to the q0 joint angle is 50 mm.
drfl.movej(q1, jvel, jacc, 0, MOVE_MODE_ABSOLUTE, 0, BLENDING_SPEED_TYPE_DUPLICATE));
// blends with the last motion to move to the q1 joint angle.