CDRFLEx.move_spiral
Features
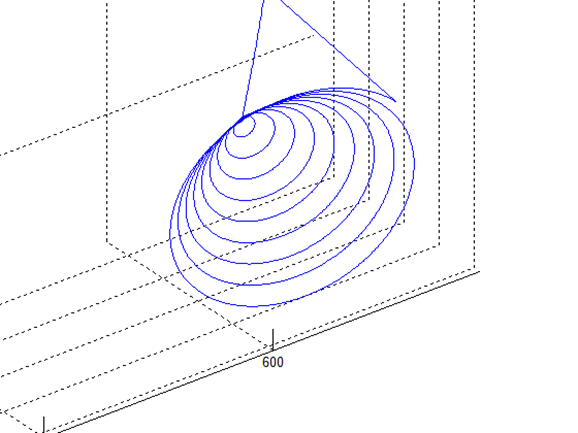
This is a function for the radius increasing in a radial direction and the robot's moving in parallel with the rotating spiral motion in an axial direction. It moves the robot along the spiral trajectory on the surface that is perpendicular to the axis on the coordinate specified as eMoveReferenceand the linear trajectory in the axis direction.
Parameter
Parameter Name | Data Type | Default Value | Range | Description |
eTaskAxis | enum.TASK_AXIS | - | - | Refer to the Definition of Constant and Enumeration Type |
fRevolution | float | - | rev > 0 | Total number of revolutions [revolution] |
fMaximuRadius | float | - | rmax > 0 | Final spiral radius [mm] |
fMaximumLength | float | - | Distance moved in the axis direction [mm] | |
fTargetVel | float[2] | - | Linear Velocity, Angular Velocity | |
fTargetAcc | float[2] | - | Linear Acceleration, Angular Acceleration | |
fTargetTime | float | 0.0 | time ≥ 0 | Total execution time <sec> |
eMoveReference | enum.MOVE_REFERENCE | MOVE_REFERENCE_TOOL | Refer to the Definition of Constant and Enumeration Type |
Note
- fRevolution refers to the total number of revolutions of the spiral motion.
- fMaximuRadius refers to the maximum radius of the spiral motion.
- fMaximumLength refers to the parallel distance in the axis direction during the motion. A negative value means the parallel distance in the axis direction.
- fTargetVel refers to the moving velocity of the spiral motion.
- fTargetAcc refers to the moving acceleration of the spiral motion.
- When fTargetTime is specified, values are processed based on fTargetTime, ignoring fTargetVel and fTargetAcc.
- eTaskAxis defines the axis that is perpendicular to the surface defined by the spiral motion.
- eMoveReference refers to the reference coordinate system defined by the spiral motion.
- This function does not support online blending of previous and subsequent motions.
Caution
- If the rotating acceleration calculated by the spiral path is too great. an error can be generated to ensure safe motion. In this case, reduce fTargetVel, fTargetAcc or fTargetTime value.
Return
Value | Description |
0 | Error |
1 | Success |
Example
float rev = 3;
float rmax = 50;
float lmax = 50;
float tvel = { 50, 50 };
float tacc = { 100, 100 };
Drfl.move_spiral(TASK_AXIS_Z, rev, rmax, lmax, tvel, tacc);
// Moves the robot from the current position maintaining
// velocity 50, 50(mm/sec, deg/sec) and acceleration 100, 100(mm/sec2, deg/sec2) for spiral trajectory to the maximum radius, 50 mm and
// moves in the direction of Tool z by 50 mm at the same time.