Übersicht über die Eigenschaften der Roboterbewegung des Aufgabeneditors
OBLIGATORISCH NORMAL 15 MIN
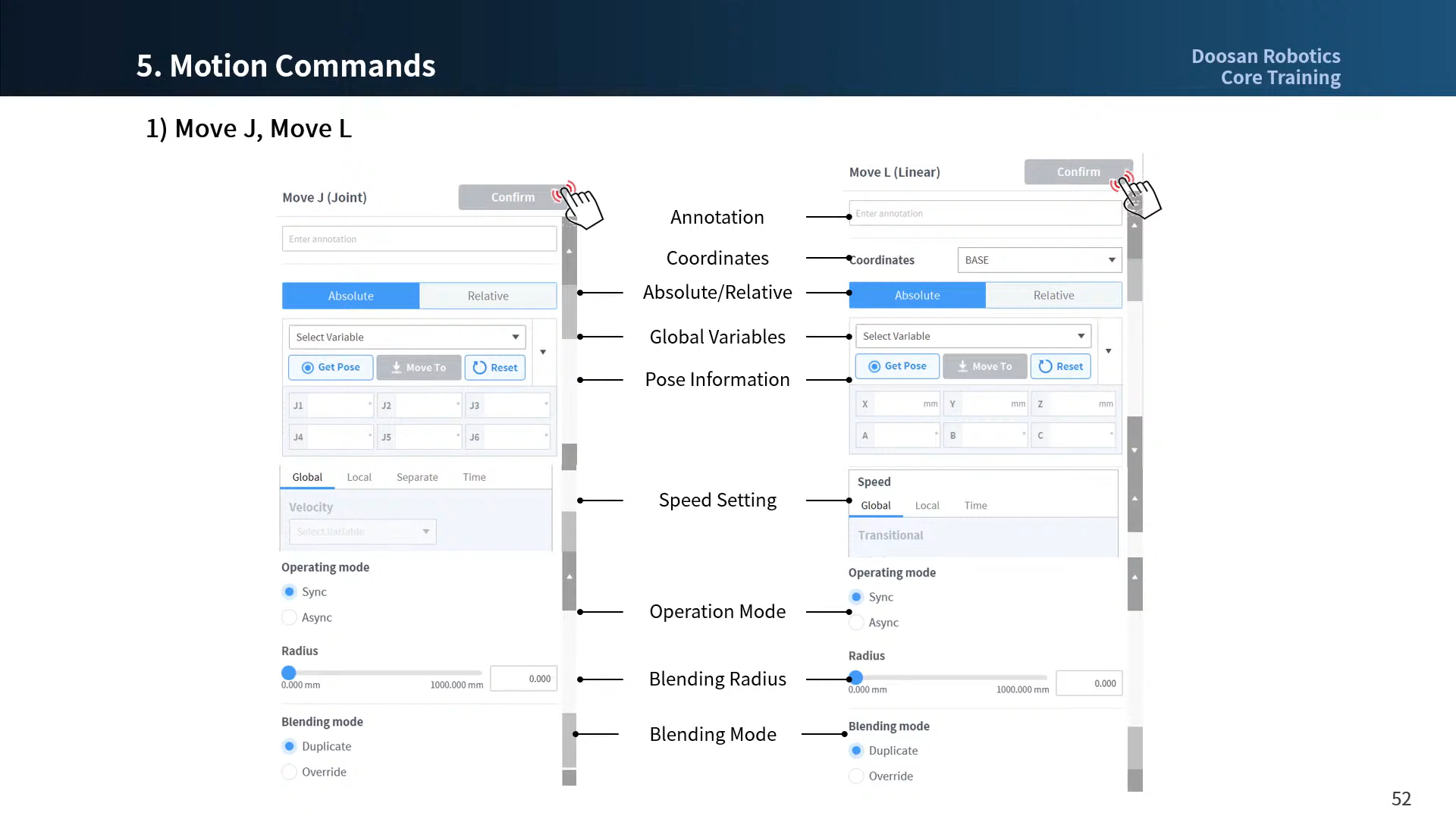
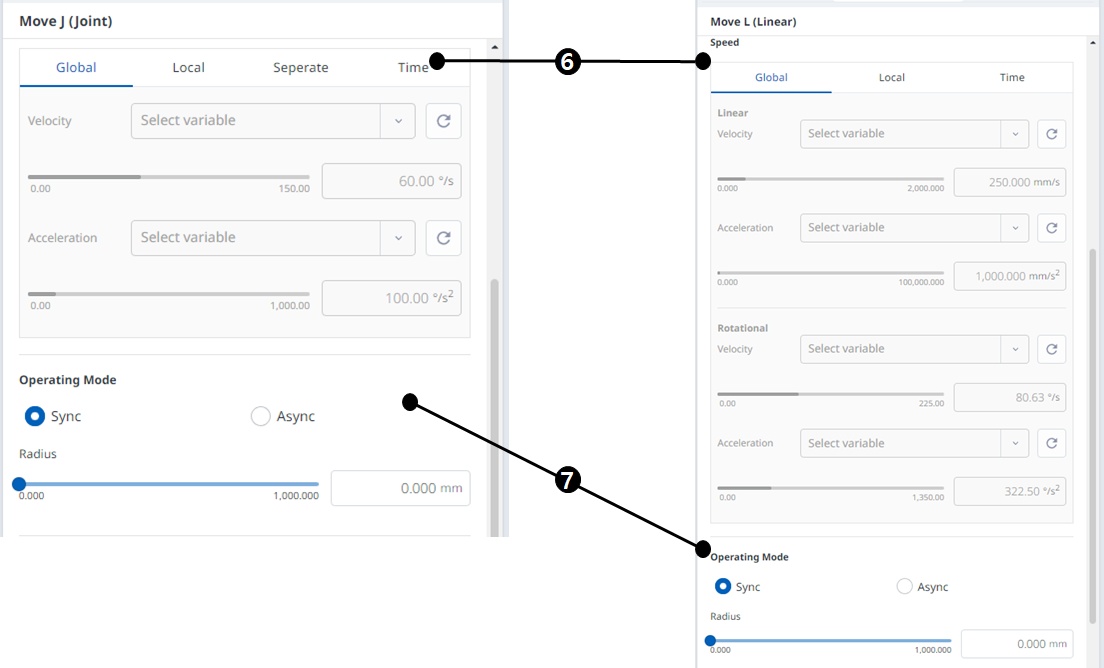
Dies ist der Eigenschaftenbildschirm der Standardbefehle Motions, MoveJ und Movel. Andere Bewegungen haben ähnliche Eigenschaften.
- Wenn eine Bewegung mit minimalen Einstellungen erzeugt wird, müssen nur die Positionsinformationen (5 in der Abbildung unten) eingegeben werden.

| Name | Beschreibung | |
|---|---|---|
| 1 | Beschriftung | Beschreibung oder Anmerkung des Befehls, die im Aufgabenfenster zu finden ist |
| 2 | Koordinaten |
|
| 3 | Wählen Sie den Verschiebungstyp aus |
|
| 4 | Wählen Sie Variable aus | Als Variablen registrierte Positionsinformationen können ausgewählt werden |
| 5 | Pose-Informationen | Positionsinformationen werden eingegeben
|
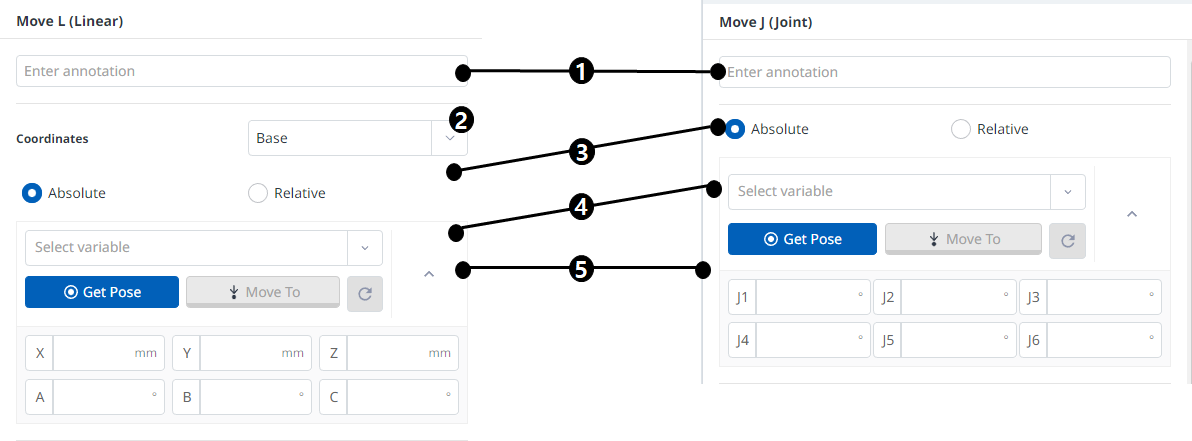
| 6 | Geschwindigkeitseinstellung |
|
| 7 | Betriebsmodus |
|
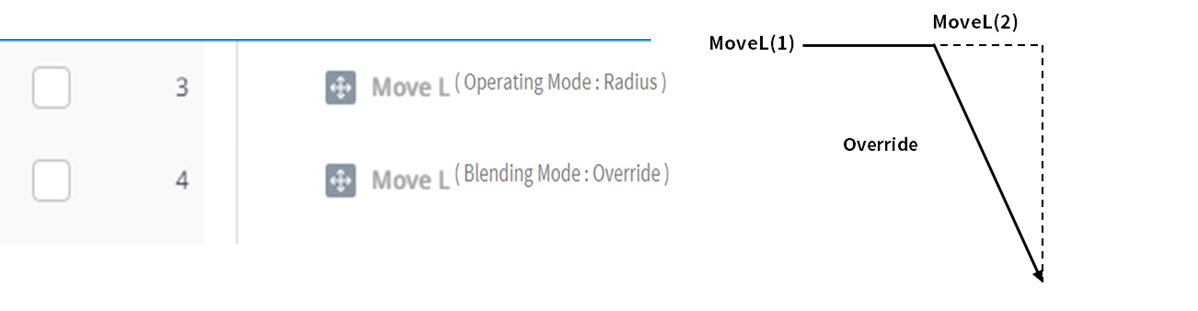
| 8 | Füllmethode | Die Option, mit der bestimmt wird, ob die vorhergehende Bewegung gemäß dem Mischmodus der folgenden Bewegung ignoriert oder überschrieben werden soll, wenn der Radius als Option der vorhergehenden Bewegung festgelegt ist |
Betriebsart
Synchronisieren
Sie können mit Sync zum nächsten Befehl wechseln, wenn der gerade ausgeführte Befehl abgeschlossen ist. Sie ist als Standard festgelegt und wird in allgemeinen Situationen verwendet.
Asynchron
Async startet den nächsten Befehl gleichzeitig, wenn der Bewegungsbefehl beginnt. Sie wird verwendet, um verschiedene Bewegungen reibungslos zu verbinden, und sie wird auch verwendet, wenn der Signalausgang gleichzeitig ein-/ausgeschaltet wird, wenn die Bewegung beginnt.

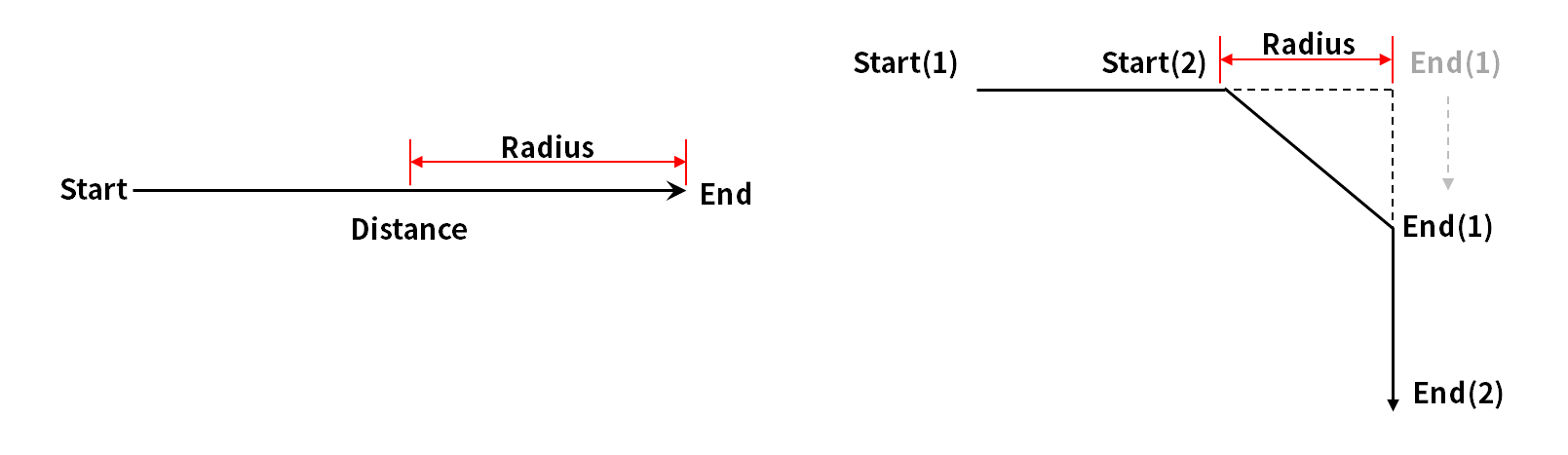
Radius
Die Option Radius aktiviert die asynchrone Funktion im Radiusabschnitt, bevor der Bewegungsbefehl seinen Zielpunkt erreicht. Mit dieser Option ist es möglich, eine nahtlose Verbindung zum nächsten Bewegungsbefehl herzustellen, ohne den aktuellen Bewegungsbefehl zu stoppen. Der Radius ist standardmäßig auf 0 mm eingestellt.
Vorsicht
Die Radiusoption hat die folgenden Merkmale und Begrenzungen:
- Die Radiusfunktion kann nur im Synchronisierungsmodus verwendet werden.
- Bedingungen und Berechnungen können im asynchronen Abschnitt innerhalb des Radius durchgeführt werden.
- Der Radius darf 1/2 des Gesamtabstands zwischen der aktuellen und der Zielposition nicht überschreiten, bevor die Bewegung ausgeführt wird.
- BSP. Wenn der Bewegungsabstand 100 mm beträgt, beträgt der maximal verfügbare Radius 50 mm.
- Die folgenden Bewegungsbefehle können keine Überblendung zwischen Bewegungen anwenden: Die Verschmelzung wird in diesen Befehlen bereits angewendet. Daher führt das Anwenden eines Radius auf diese Befehle und deren Ausführung zu Fehlern. Durch die Verwendung von Befehlen wie WaitMotion und StopMotion können Fehler vermieden werden.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
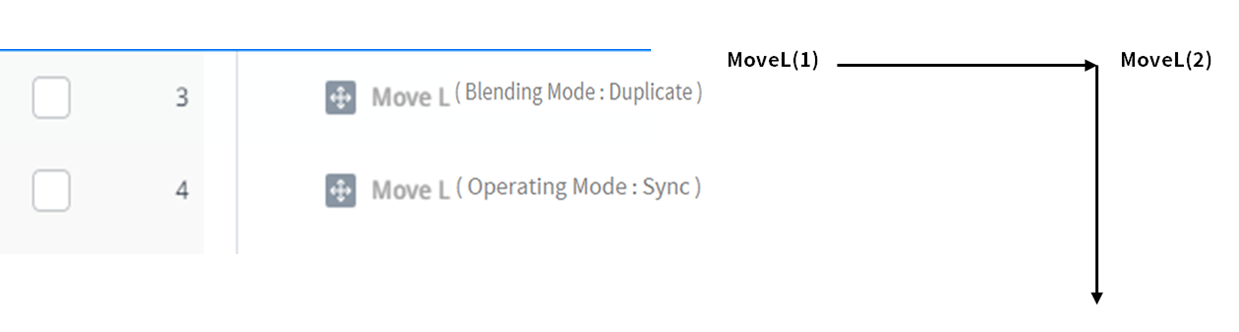
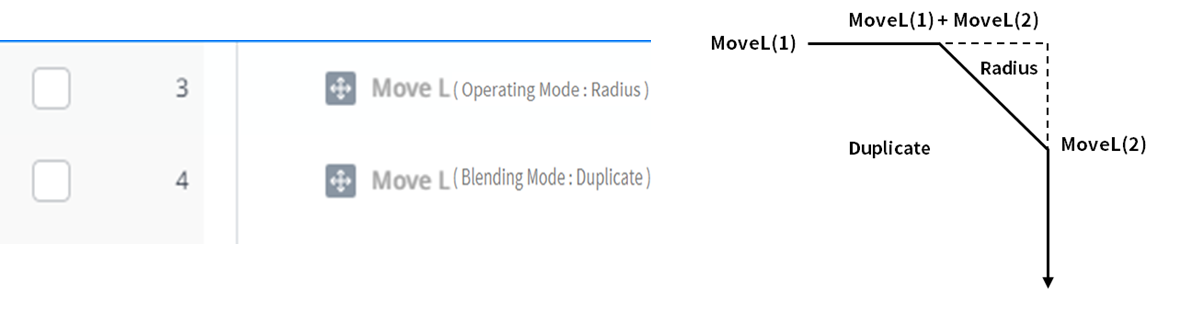
Füllmethode
Diese Option wird verwendet, um zu bestimmen, ob die vorhergehende Bewegung entsprechend dem Mischmodus der folgenden Bewegung ignoriert oder überschrieben werden soll, wenn der Radius als Option der vorhergehenden Bewegung festgelegt ist.
Duplizieren
Duplizieren ist ein Modus, der die vorhergehende Bewegung beibehält, damit die folgende Bewegung sich mit der vorhergehenden Bewegung überlappt.
Überschreiben
Überschreiben ignoriert und überschreibt die vorhergehende Bewegung, um die folgende Bewegung auszuführen.