
Flansch I/O
Die Endflanschabdeckung des Roboters verfügt über zwei 8-polige Steckverbinder der Größe M8, siehe nachstehende Abdeckung bezüglich Anordnung und Formgebung.
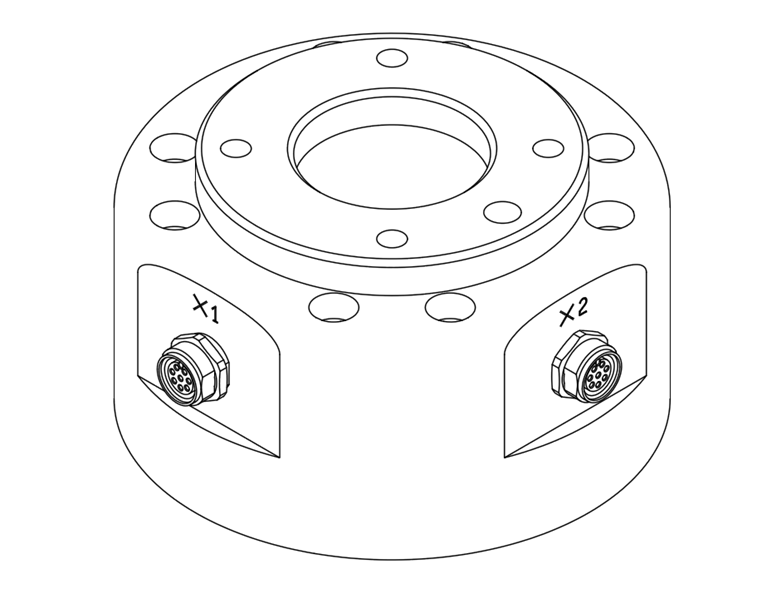
Der Steckverbinder liefert Stromversorgung und Steuerungssignale, die zum Betreiben der in Greifer oder besonderen Roboterwerkzeugen integrierten Sensoren erforderlich sind. Folgendes sind Beispiele für Industriekabel (es können gleichwertige Kabel verwendet werden):
- Phoenix contact 1404178, male (Straight)
- Phoenix contact 1404182, male (Right Angle)
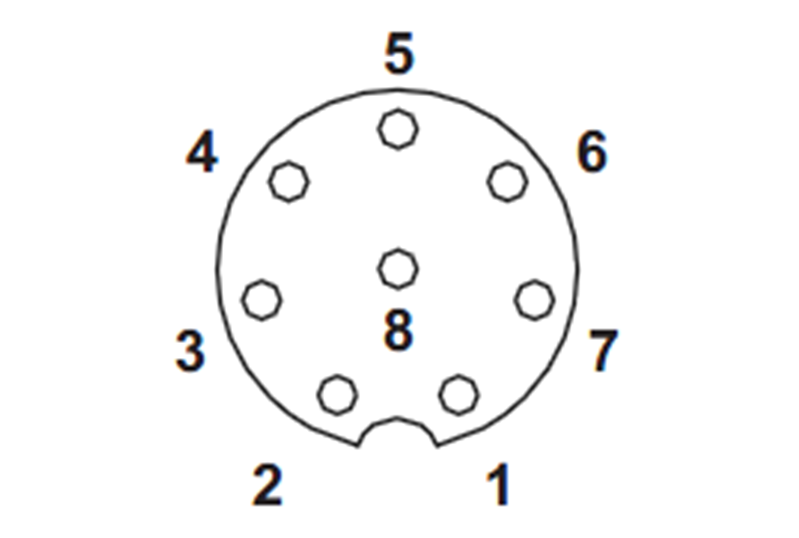
Die Klemmenbelegung jedes Steckverbinders ist wie folgt:
Schematic Diagram
Die über Steckverbinder X1 und X2 bereitgestellten Eingangs-/Ausgangsfunktionen (I/O) unterscheiden sich voneinander, siehe nachstehende Tabelle für detaillierte Einstellungen zu Eingang/Ausgang (I/O).
Einstellung X1 (Digital-Eingang/Ausgang (I/O))
No | Signal |
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Digital Output 3 |
5 | +24V |
6 | Digital Input 3 |
7 | Digital Input 2 |
8 | GND |
Einstellung X2 (Digital-Eingang/Ausgang (I/O))
Nr. | Signal |
1 | Digital Input 4 |
2 | Digital Output 4 |
3 | Digital Output 5 |
4 | Digital Output 6 |
5 | +24V |
6 | Digital Input 6 |
7 | Digital Input 5 |
8 | GND |
Die interne Stromversorgung des Flansch I/O ist auf 24 V eingestellt und siehe die nachstehende Tabelle für detaillierte Spezifikationen der Stromversorgung während des Anschließens von Eingang/Ausgang (I/O).
Parameter | Min | Typ | Max | Einheit |
Versorgungsspannung | - | 24 | - | V |
Stromstärke Stromversorgung | - | - | 3 | A |
Digitalausgang | - | 6 | - | EA |
Digitaleingang | - | 6 | - | EA |
Die Einstellung wird seit dem 11. April 2024 wie folgt berechnet
Einstellung X1
No | Signal |
|---|---|
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Analog Input 1 / RS-485 + |
5 | +24V / +12V / 0V (off) |
6 | Analog Input 2 / RS-485 - |
7 | Digital Input 2 |
8 | GND |
Einstellung X2
| No | Signal |
|---|---|
| 1 | Digital Input 3 |
| 2 | Digital Output 3 |
| 3 | Digital Output 4 |
| 4 | Analog Input 3 / RS-485 + |
| 5 | +24V / +12V / 0V (off) |
| 6 | Analog Input 4 / RS-485 - |
| 7 | Digital Input 4 |
| 8 | GND |
Beschreibung der E/A-Funktionen
| Typ | Beschreibung |
|---|---|
| Power | Stellen Sie die interne Stromversorgung auf 0 V (Standard), 12 V oder 24 V ein |
| Digital Output | Stellen Sie entweder PNP (Quellentyp, Standard) oder NPN (Senkentyp) ein |
| Digital Input | PNP (Quellentyp, Standard) |
| Analog Input | Stellen Sie entweder Spannung (0-10 V) oder Strom (4-20 mA, Standard) ein |
| RS-485 | Max. 1 M Baudrate |
Stellen Sie die interne Stromversorgung auf 0 V, 12 V oder 24 V ein. Die elektrischen Spezifikationen sind unten aufgeführt:
| Parameter | Min | Typ | Max | Einheit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Warnung
- Werkzeug und Greifer so einrichten, dass diese bei Abschaltung der Stromversorgung keine Gefahren darstellen können.(z. B. das Herabfallen eines workpiece aus dem Werkzeug)
- An Klemme Nr. 5 jedes Steckverbinders liegt dauerhaft 24 V an; solange Stromversorgung am Roboter anliegt, deshalb muss bei Einrichtung von Werkzeug und Greifer die Stromversorgung ausgeschaltet werden.