
Einstellen der Koordinaten zum Verschieben auf Basis des Werkzeugs
Um den Roboter basierend auf den Werkzeugkoordinaten zu bewegen, führen Sie die folgenden Schritte aus:
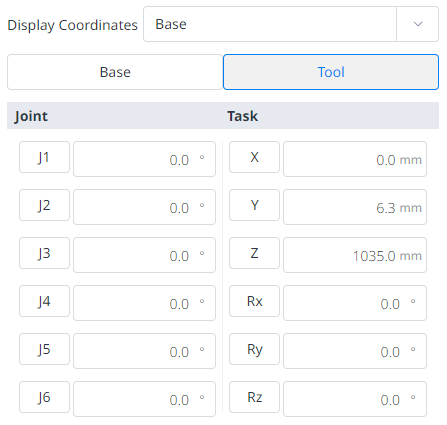
- Wählen Sie die Registerkarte Verschieben und dann die Registerkarte Aufgabeaus.
- Wählen Sie die Registerkarte Tool aus.
- Konfigurieren Sie die Position so, dass sie sich in Bezug auf das Werkzeug bewegt.
- Tippen und halten Sie die Taste Move to corresponding pose (zur entsprechenden Pose bewegen), um zu den eingestellten Koordinaten zu gelangen.