
Einstellen des Winkels zum Bewegen
Um den Roboter in einem bestimmten Winkel zu bewegen, führen Sie die folgenden Schritte aus:
- Wählen Sie die Registerkarte „Verschieben“.
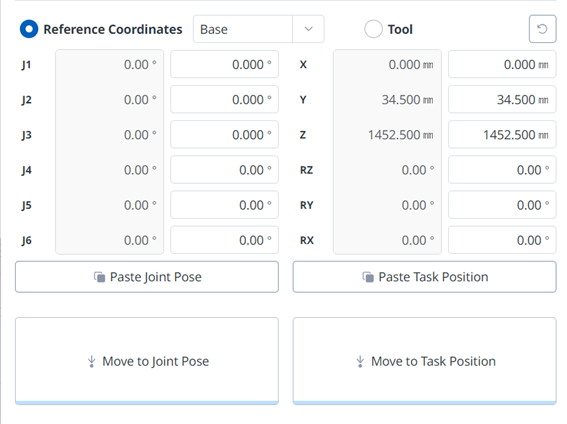
- Geben Sie den Zielwinkel der Roboterverbindung ein.
- Aktivieren Sie den Realmodus.
- Tippen und halten Sie die Taste Move to corresponding Pose (zur entsprechenden Position bewegen), um den Winkel des Robotergelenks anzupassen.