
Übersicht über Sub/Call Sub
OPTIONAL NORMAL 5 MIN
Sub ist eine Abkürzung für Subroutine. Eine Subroutine bezieht sich auf einen Prozess, der die Anzahl der Schritte in einem Programm minimiert, indem erforderliche Teile aufgerufen werden, wenn zwei oder mehr doppelte Teile vorhanden sind.
- Doosan Robotics Roboter bieten einen CallSub-Befehl zum Aufrufen von Unterbefehlen und des entsprechenden Unterabschnitts.
- Der Unterbefehl funktioniert wie in Python definiert.
Hinweis
- Ein Unterabsatz muss in MainSub, dem Anfang eines Hauptabsatzes, und in End MainSub, dem Ende eines Hauptabsatzes, hinzugefügt werden.
- Neben der Wiederholung wird der Befehl Sub auch verwendet, um einen Hauptabsatz zu vereinfachen. Mithilfe eines Unterbefehls können Sie intuitiv erkennen, welche Aufgabe eines Hauptabsatzes gerade ausgeführt wird.
- Die Verwendung eines Unterbefehls ermöglicht das Testen der Unterabsatzeinheit.
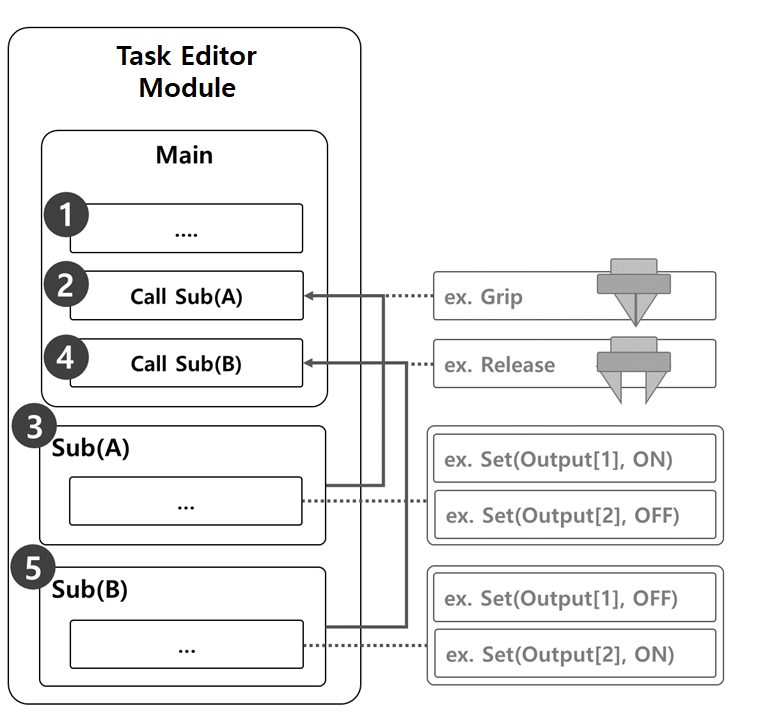
Das Beispiel, in dem ein Unterbefehl verwendet wird, um Greif- und Losbewegungen eines Robotergreifers auszuführen, besteht aus den folgenden Elementen.
- Zeilen des Hauptabschnitts führen das Task-Programm in sequenzieller Reihenfolge aus, beginnend mit der ersten Zeile.
- In Sub(A) verschieben, das von Call Sub aufgerufen wird.
- Probe
- Programm: Rufen Sie die Grip-Subroutine.
- Roboter: Keine Bewegung.
- Probe
- Sub(A) wird ausgeführt. Alle untergeordneten Absatzzeilen werden in der Reihenfolge ausgeführt, kehren zum Hauptabsatz zurück und führen die nächste Zeile aus.
- Probe
- Programm: Führen Sie die Positionen der Unterroutine Grip in sequenzieller Reihenfolge aus. Verwenden Sie den Befehl Set, um die Ausgabe [1] auf EIN und die Ausgabe [2] auf AUS zu setzen.
- Roboter: Der Robotergreifer führt die Griffbewegung aus.
- Probe
- Wechsel zu Sub(B), das von Call Sub aufgerufen wird.
- Probe
- Programm: Rufen Sie die Subroutine Release auf.
- Roboter: Keine Bewegung.
- Probe
- Sub(B) wird ausgeführt. Alle untergeordneten Absatzzeilen werden in der Reihenfolge ausgeführt, kehren zum Hauptabsatz zurück und führen die nächste Zeile aus.
- Probe
- Programm: Führen Sie die Positionen der Unterroutine Grip in sequenzieller Reihenfolge aus. Verwenden Sie den Befehl Set, um die Ausgabe [1] AUF AUS und die Ausgabe [2] auf EIN zu setzen.
- Roboter: Der Robotergreifer führt die Freigabemethode aus.
- Probe
Unterbefehl hinzufügen
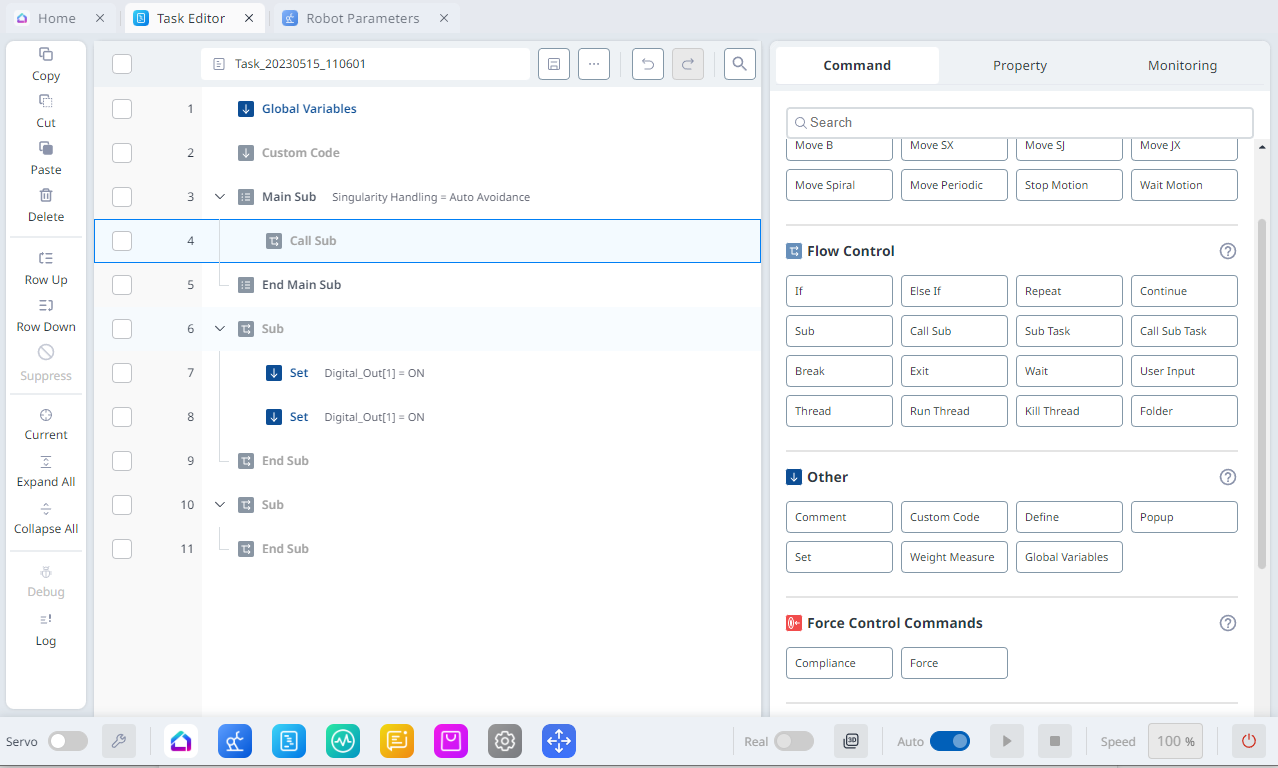
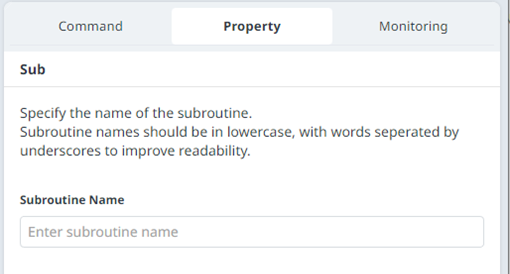
- Fügen Sie im Task-Editor im Abschnitt Flusssteuerung des rechten Befehlsmenüs einen Unterbefehl hinzu.
- Geben Sie den Namen der Unterroutine ein.
CallSub-Befehl hinzufügen
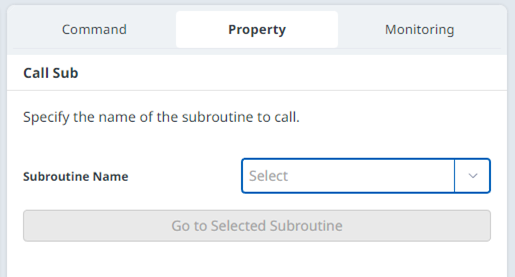
- Fügen Sie im Task-Editor im Abschnitt Flusssteuerung des rechten Befehlsmenüs einen Unterbefehl aufrufen hinzu.
- Wählen Sie den Namen der Subroutine aus, die mit dem Unterbefehl registriert wurde.
Hinweis
- Wenn sich die Anzahl der Zeilen im Aufgabenprogramm erhöht, kann es schwierig werden, Subroutinen zu finden. Berühren Sie in diesem Fall den Befehl Gehe zu ausgewählter Unterroutine im Befehl Eigenschaft des CallSub, um den Fokus auf die entsprechende Unterbefehlszeile zu verschieben.