Eulerwinkel im Überblick
Euler Winkel ist eine Möglichkeit, die Winkel der X-, Y- und Z-Achse auszudrücken, die in der Objektrichtung senkrecht zueinander liegen. A, B und C beziehen sich auf die sequenziellen Rotationswinkel. Jeder Roboterhersteller definiert diese A-, B- und C-Rotationsreihenfolge unterschiedlich, z. B. Rz-Ry-Rz, Rz-Ry-Rx oder Rx-Ry-Rz.
Zum Beispiel Rz-Ry-Rx. Dabei bedeutet Rz die Drehung in der Z-Achse, Ry die Drehung in der Y-Achse und Rx die Drehung in der X-Achse. Rz kann als Winkel A, Ry als Winkel B und Rx als Winkel C ausgedrückt werden, um die aktuelle Drehrichtung eines Objekts anzugeben. Beachten Sie, dass, sobald eine Drehung in Z-Achsenrichtung von den Koordinaten aus erfolgt, Drehungen auf Grundlage neuer Koordinaten vorgenommen werden.
Dies kann in den Schritten 1 bis 4 dargestellt werden.
Angenommen, es gibt Koordinaten (X, Y, Z).
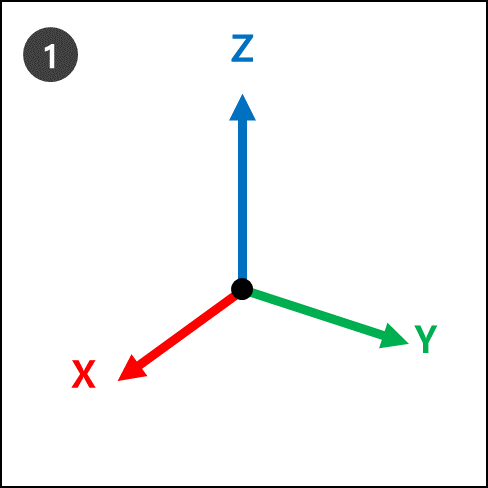
Rz: Um einen Grad von der Z-Achse drehen.
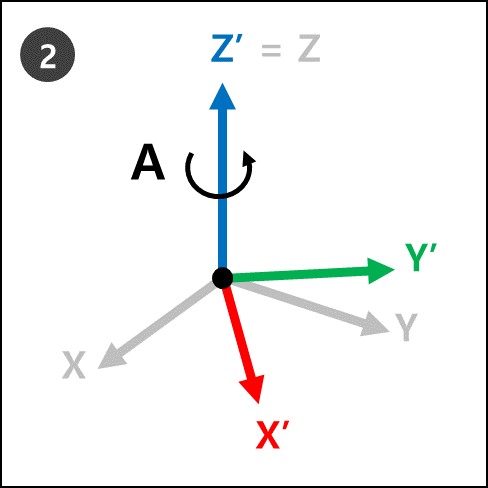
Ry : Rotation um B Grad von der neuen Y-Achse (Y’) der neuen Koordinaten (X’, Y’, Z’) in Schritt 2.
Rx : Drehen Sie in Schritt 3 um C Grad von der neuen X-Achse (X’’) der neuen Koordinaten (X’’, Y’’, Z’’).
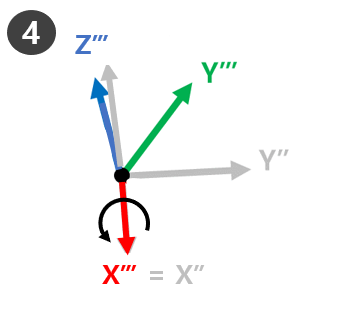
Die neuen Koordinaten (Z’’’, Y’’’, X’’’’ in Schritt 4 beziehen sich auf die aktuelle Roboterrotation, wenn Eulersche Winkel A, B und C angewendet werden.
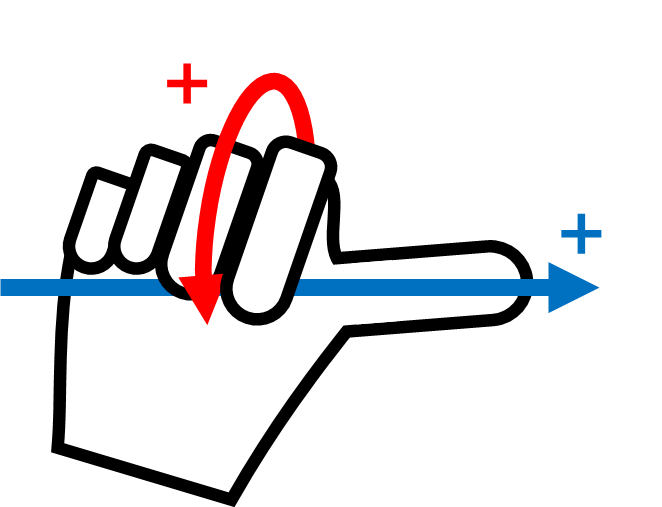
Dies lässt sich leicht mit der rechten Hand visualisieren. Nehmen Sie die folgende Pose mit der rechten Hand ein. Dies wird als „rechte Regel“ bezeichnet. Wenn Daumen (X-Achse), Zeigefinger (Y-Achse) und Mittelfinger (Z-Achse) senkrecht zueinander stehen, werden Koordinaten erzeugt, die aus X-, Y- und Z-Achsen bestehen.
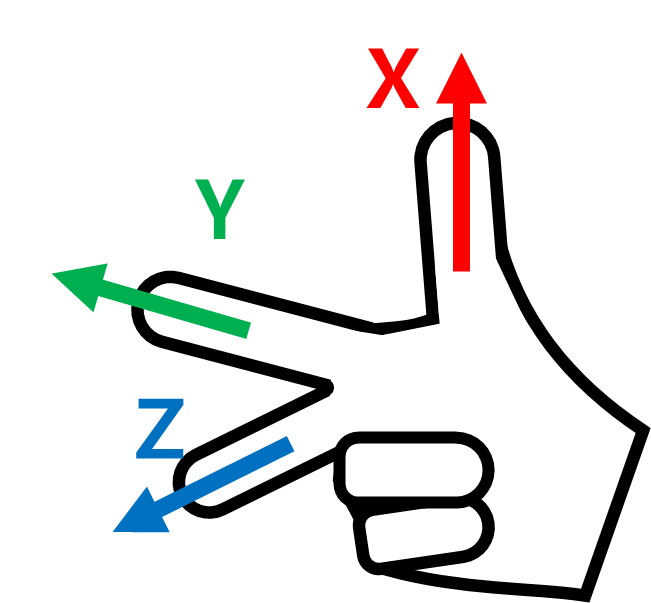
Dann die rechte kartesische Regelstellung und die Drehungen Rz, Ry und Rx in der Reihenfolge.
Rz: Drehen Sie den Mittelfinger (Z-Achse) um A Grad.
Ry: Drehen Sie den Zeigefinger (Y-Achse) um B Grad.
Rx: Drehen Sie den Mittelfinger (X-Achse) um C Grad.
Hinweis
Die +-Drehrichtung von A, B und C ist die Richtung der vier Finger außer dem Daumen, wenn der Daumen in die +-Richtung zeigt und die vier Finger zusammengedrückt sind. Dies wird als das Gesetz der Schraube im Uhrzeigersinn bezeichnet.