
Ausführung basiert auf Roboterwerkzeug

Um den Roboter basierend auf dem Roboterwerkzeug zu bewegen, führen Sie die folgenden Schritte aus:
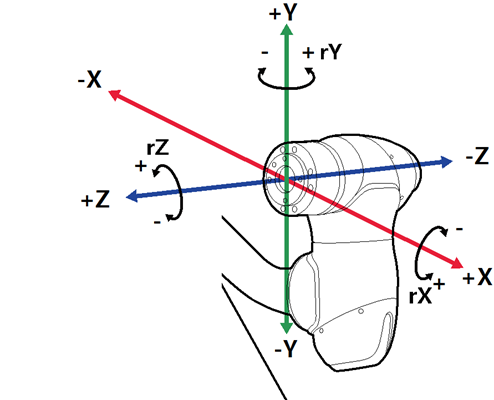
- Wählen Sie das Werkzeug als Referenzkoordinatensystem aus.
- Wählen Sie im Aufgabenbereich die Achse (X~RX) aus, für die Sie den Winkel anpassen möchten.
- Halten Sie eine Richtungstaste (+,_) gedrückt, um die entsprechende Achse zu bewegen.
Hinweis
- Sicherheitsbereich gilt nicht im virtuellen Modus.
- Rx, Ry und Rz werden gemäß TCP (Werkzeugmittelposition) ausgeführt.