Überblick über das Konzept der Compliance/Force Control des Befehls des Aufgabeneditors
OPTIONAL HART 20 MIN
Kraftsteuerung und Compliance-Kontrolle sind Funktionen, die die Kraft des Roboters steuern. Außerdem kann durch Hinzufügen von Bewegungsbefehlen die Kraft gleichzeitig mit der Bewegung gesteuert werden. Compliance Control und Force Control weisen die folgenden Unterschiede auf.
- Compliance-Kontrolle
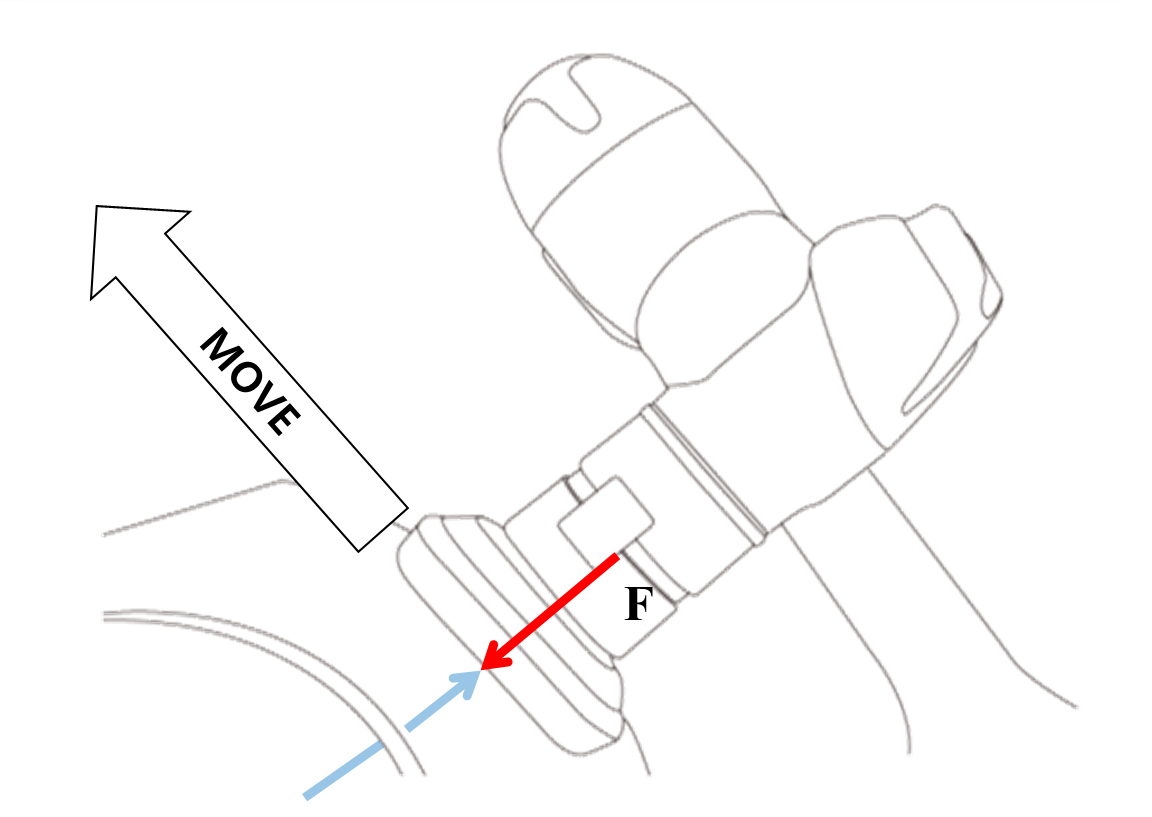
- Im Fall der Compliance-Kontrolle entspricht der Roboter der externen Kraft am Ende der TCP des Roboters. Wenn die externe Kraft entfernt wird, wird eine Kraft erzeugt, um den Roboter wieder an die Stelle zu bewegen, an der er sich befinden sollte.
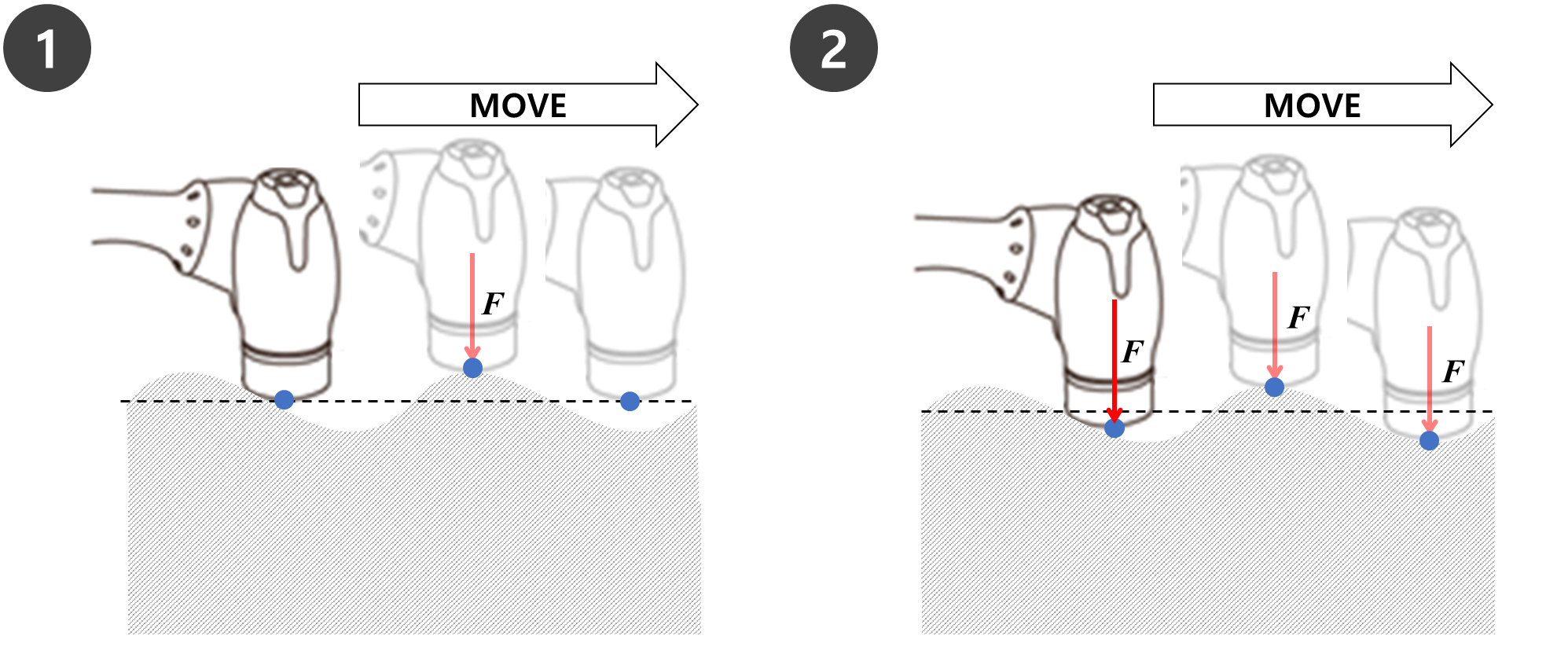
- Dieser Ansatz kann verwendet werden, wenn sich ein Roboter in einer geraden Linie auf einer holprigen Oberfläche bewegt und Sie sicherstellen möchten, dass sich der Roboter bewegt, ohne sich selbst oder die Oberfläche zu beschädigen. Dies kann auch verwendet werden, um unerwartete Kollisionen in der Nähe von Werkstücken zu vermeiden.
- Kraftsteuerung
- Bei der Kraftsteuerung wird die Kraft auf die TCP am Ende des Roboters angewendet. Die Beschleunigung wird in der Richtung erzeugt, in der die Kraft erzeugt wird. Dadurch bewegt sich der Roboter zusätzlich zur Bewegungsrichtung gleichzeitig in die Richtung der Kraft.
- Wenn der Roboter mit einem Objekt in Kontakt kommt, wird die Kraft auf das Objekt angewendet, bis die eingestellte Kraft und die abstoßende Kraft des Objekts im Gleichgewicht sind.
- Dieser Ansatz kann verwendet werden, wenn sich ein Roboter in einer geraden Linie auf einer holprigen Oberfläche bewegt und Sie sicherstellen möchten, dass eine konstante Kraft auf eine Oberfläche angewendet wird. Dies kann auch für Aufgaben verwendet werden, bei denen der Roboter mit konstanter Kraft drücken muss, z. B. Polierarbeiten.
Hinweis
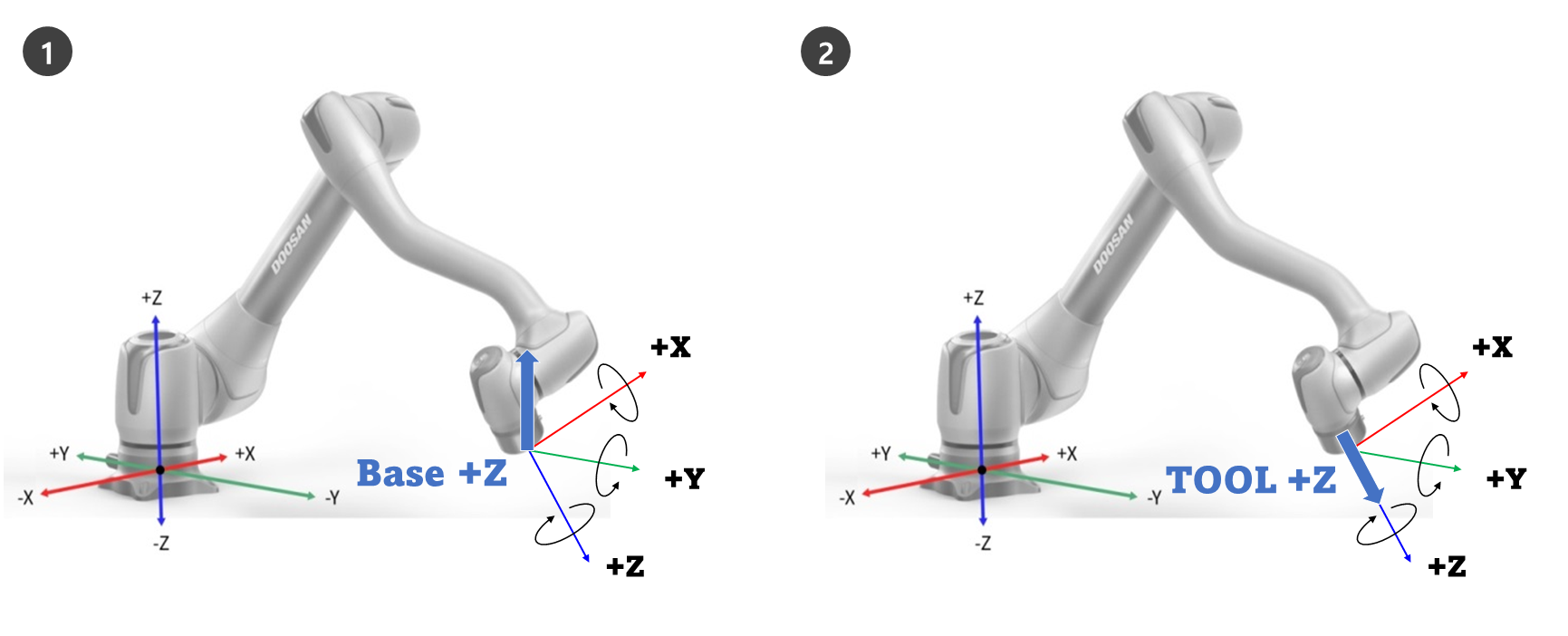
Compliance- und Force-Befehle werden basierend auf den aktuellen Koordinaten ausgeführt. Die Standardkoordinate einer Aufgabe sind die Basiskoordinaten, und die Koordinaten können mit dem Befehl Set geändert werden.
- Abb. 1 ist die Betriebsrichtung, wenn Kraft-/Compliance-Steuerung in +Z-Richtung auf die Basiskoordinaten angewendet wird.
- Abb. 2 ist die Betriebsrichtung, wenn Kraft-/Compliance-Steuerung in +Z-Richtung auf die Werkzeugkoordinaten angewendet wird.
Compliance-Kontrolle
Die Compliance-Steuerung ist die Funktion, die die externe Kraft entsprechend der festgelegten Steifigkeit einhält, wenn eine Kraft auf die TCOP am Ende des Roboters angewendet wird. Es gleicht die Kräfte am Zielpunkt aus und ist eine Steuerungsmethode, die Abstoßkraft erzeugt, wenn eine Verschiebung vom Ausgleichspunkt entfernt auftritt. Während der Compliance-Kontrolle prallt das Roboterende wie eine Feder.
- Bei einer Kollision, wenn die Bewegungssteuerung allein verwendet wird, kann das kollidierte Objekt beschädigt werden.
- Die Roboter von Doosan Robotics halten bei einer Kollision sicher an. Abhängig von den Benutzereinstellungen, wie z. B. Sicherheitsgrenzen > Kollisionsempfindlichkeit, können jedoch die folgenden Situationen auftreten.
- Wenn die Compliance-Steuerung während der Bewegungssteuerung aktiviert ist, bewegt sich der Roboter, während er sich dem kollidierten Objekt anpasst.
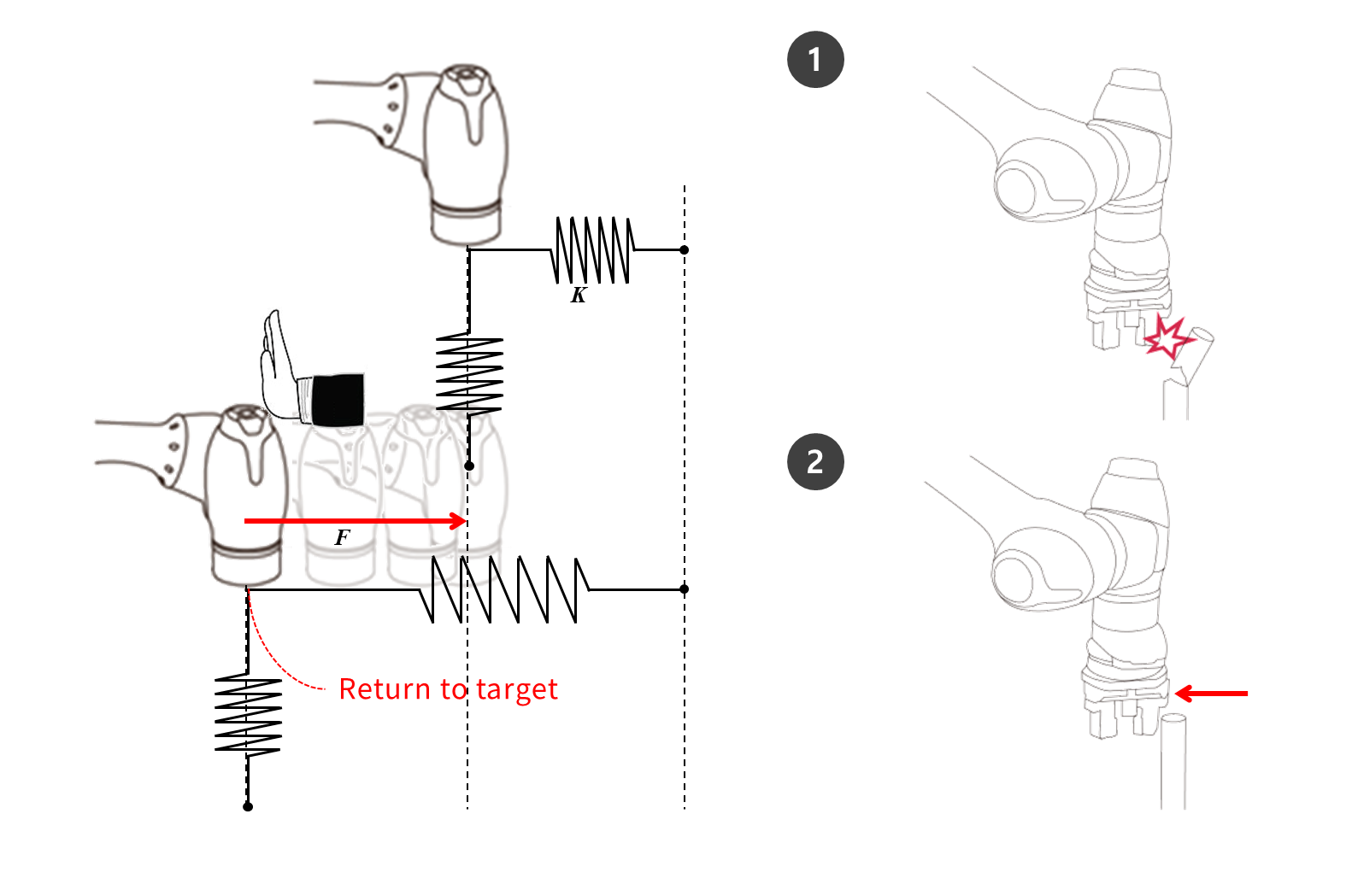
Wenn F die externe Kraft, K die Steifigkeit und X der Abstand ist, gelten die folgenden Formeln.
- F = K * X
- K = F / X
- X = F / K
Basierend auf den obigen Formeln beträgt die generierte externe Kraft 1N, wenn die Steifigkeit der Compliance-Kontrolle auf 1000N mm/m eingestellt ist und sich der Roboter um 1 mm bewegt.
- F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Hinweis
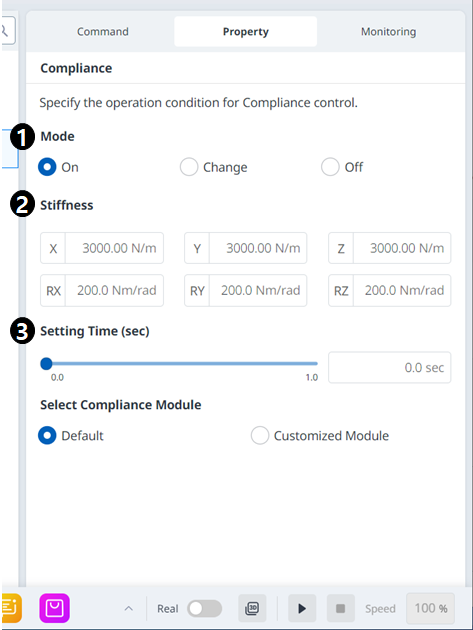
In der Eigenschaft des Befehls Compliance können die folgenden Werte festgelegt werden:
- Modus
- Ein: Aktiviert die Compliance-Kontrolle
- Änderung: Wenn der Compliancemodus auf ein gesetzt ist, ändert er sich in Steifigkeit
- Aus: Deaktiviert die Compliance-Kontrolle
- Steifigkeitsbereich
- Serie M/H: Translation (0~20000N/m), Rotation (0~1000Nm/Rad)
- A-Serie: Translation (0~10000N/m), Rotation (0~300Nm/Rad)
- Niedrigere Steifigkeitswerte reagieren sanfter auf externe Kräfte und erfordern mehr Zeit, um zum Zielpunkt zurückzukehren
- Zeit Einstellen
- Dies ist die Zeit, die der aktuelle Steifigkeitswert benötigt, um den eingestellten Steifigkeitswert zu erreichen (0-1s).
Vorsicht
- Werkzeuggewicht und TCP (Werkzeugmittelpunkt) müssen genau eingestellt sein. Ein ungenaues Werkzeuggewicht kann dazu führen, dass der Roboter das Werkzeuggewicht als externe Kraft erkennt, und wenn der Compliance-Befehl aktiviert wird, wird ein Positionsfehler generiert.
- Die Spannung des Kleiderpakets kann ein externes Drehmoment auf den Roboter erzeugen. Daher ist beim Einbau des Kleiderpakets Vorsicht geboten.
- Compliance kann nicht ein- oder ausgeschaltet werden, während eine asynchrone Bewegung oder eine Mischbewegung ausgeführt wird.
- Bei eingeschaltetem Compliance-Befehl ist nur eine lineare Bewegung zulässig. Gelenkbewegungen wie MoveJ und MoveSJ sind nicht zulässig.
- Bei eingeschaltetem Compliance-Befehl können Werkzeuggewicht oder TCP nicht geändert werden.
- Während des Befehls 'Übereinstimmung' auf ist es möglich, den Zielpunkt nicht genau zu erreichen, da das während der Ausführung der Bewegung erzeugte Drehmoment eingehalten wird. Daher wird empfohlen, die Compliance-Kontrolle in der Nähe des Zielpunkts zu aktivieren. Oder es ist möglich, Positionsfehler durch Festlegen eines großen Steifigkeitswerts zu minimieren.
Kraftsteuerung
Kraftsteuerung ist eine Funktion, die Kraft in Richtung der Kraftsteuerung aufwendet, bis die eingestellte Kraft und die Abstoßkraft ausgeglichen sind
- Er bewegt den Roboter in die festgelegte Kraftrichtung, und wenn ein Objekt berührt wird, behält er die eingetretene Kraft (N) bei.
- Es kann eine Bewegungssteuerung in eine andere Richtung als die Kraftrichtung durchführen, während eine konstante Kraft angewendet wird
- Die Mindesteinstellung ist +/- 10N und kann mit einer Auflösung von 0,2N fein eingestellt werden
- Kraftsteuerung ist in Singularitätsbereich nicht verfügbar
- Im Allgemeinen wird Compliance Control in Verbindung mit der Kraftsteuerung verwendet, sodass die Kraftsteuerung der externen Kraft entspricht
Hinweis
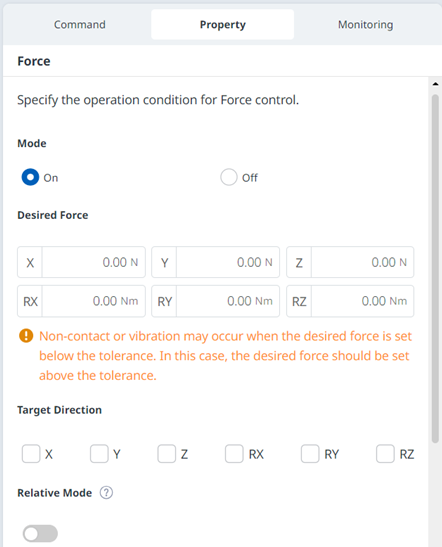
In der Eigenschaft des Befehls 'Kraft' können die folgenden Werte festgelegt werden.
- Modus
- Ein: Aktiviert Die Kraftsteuerung
- Aus: Deaktiviert Die Kraftsteuerung
- Gewünschter Kraftbereich
- X, Y, Z: 10 - (Maximum jedes Roboters) N
- A, B, C: 5 - (Maximum pro Roboter) Nm
- Weitere Informationen zur Maximalkraft finden Sie Oberer/unterer Schwellenwertbereich und Standardwert von Sicherheitsparameternunter .
- Zielrichtung
- Sie wird zum ausgewählten Zielwert jeder Richtung verschoben.
- Es können mehrere Optionen ausgewählt werden.
- Kraftsteuerung kann nur mit Richtungseinstellung nach Krafteinstellung ausgeführt werden.
- Wenn eine der mehreren ausgewählten Richtungen die Zielkraft erreicht, bewegt sie sich weiter, bis der Zielwert für die andere Richtung erreicht ist.
- Relativer Modus
- Wenn dieser Modus aktiviert ist, wird die auf den Roboter angewendete externe Kraft auf 0 kalibriert, um die Genauigkeit der Kraftsteuerung zu verbessern.
- Wenn der relative Modus deaktiviert ist, ist die auf das Ziel wirkende tatsächliche Kraft gleich der Summe der eingestellten Kraft und der externen Kraft.
- Wenn der relative Modus aktiviert ist, ist die auf das Ziel wirkende tatsächliche Kraft gleich der eingestellten Kraft.
- Während der Kraftsteuerung kann es je nach Stellung oder externer Kraft zu Abweichungen kommen.
- Während der Kraftsteuerung ist es möglich, den genauen Zielpunkt nicht zu erreichen. Daher wird empfohlen, die Kraftsteuerung in der Nähe des Zielpunkts zu aktivieren.
- Wenn dieser Modus aktiviert ist, wird die auf den Roboter angewendete externe Kraft auf 0 kalibriert, um die Genauigkeit der Kraftsteuerung zu verbessern.
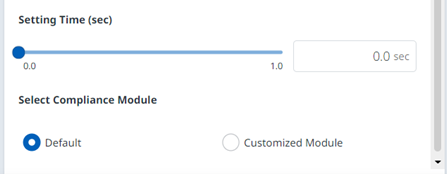
- Zeit Einstellen
- Dies ist die Zeit, die der aktuelle Kraftwert benötigt, um den eingestellten Kraftwert (0-1s) zu erreichen.