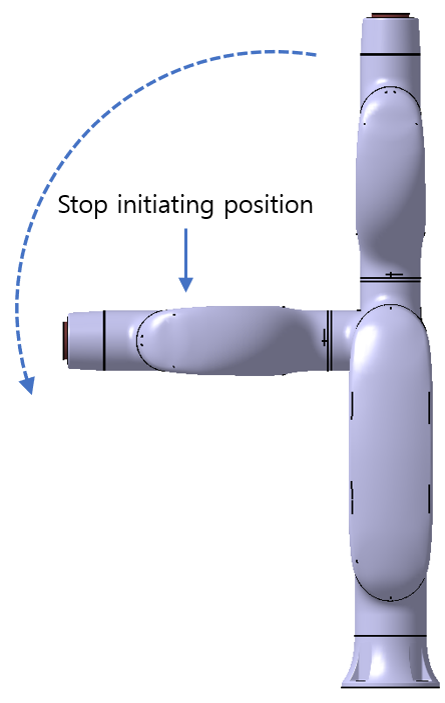
Die Messungen für Gelenk 1 werden bei senkrecht zum Boden verlaufender Drehachse und horizontaler Bewegung durchgeführt.
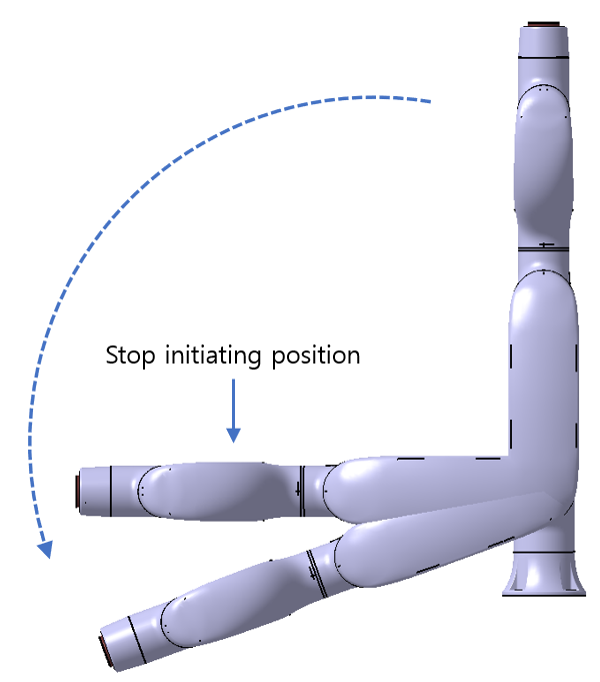
Die Messungen für Gelenk 2 und Gelenk 3 werden bei parallel zum Boden verlaufender Drehachse durchgeführt, wenn der Roboter in einer Abwärtsbewegung senkrecht zum Boden gestoppt wird.
Hinweis
Die Messergebnisse gelten für den ungünstigsten Fall. Die Messungen können abhängig von den jeweiligen Umständen schwanken.
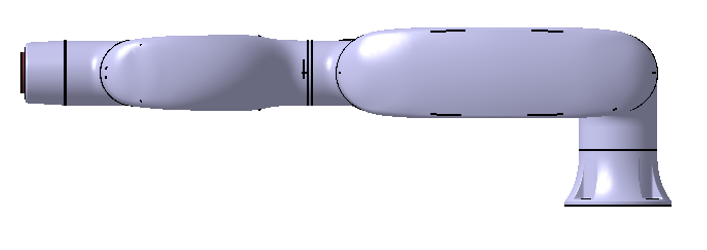
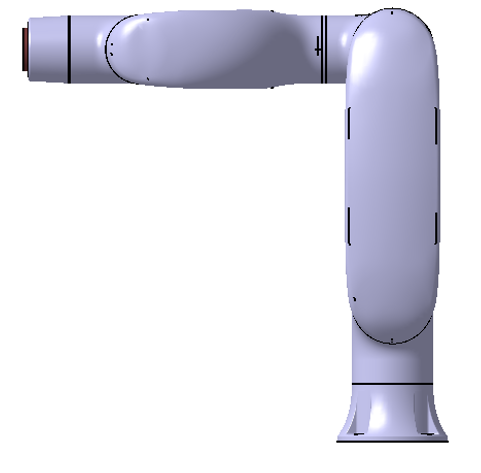
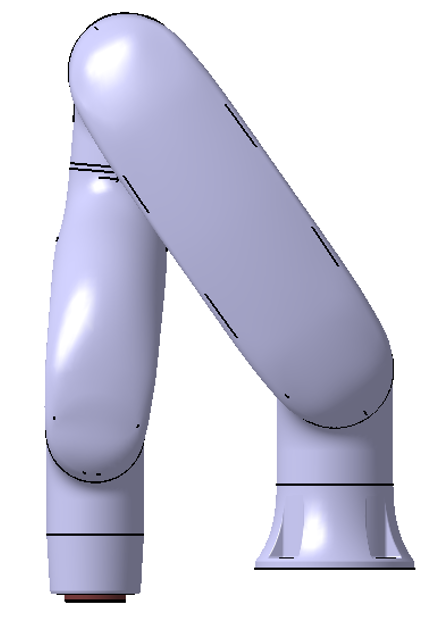
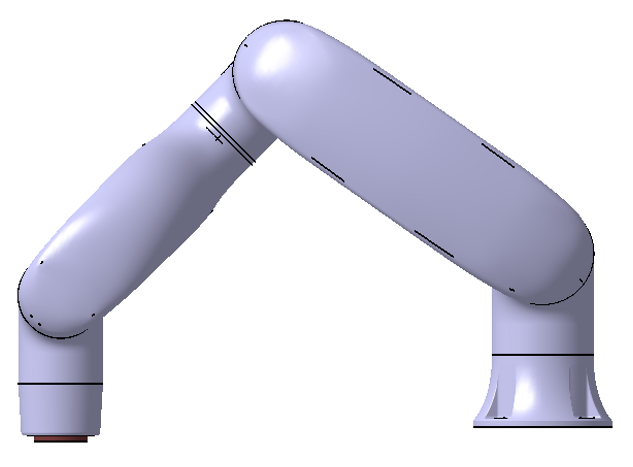
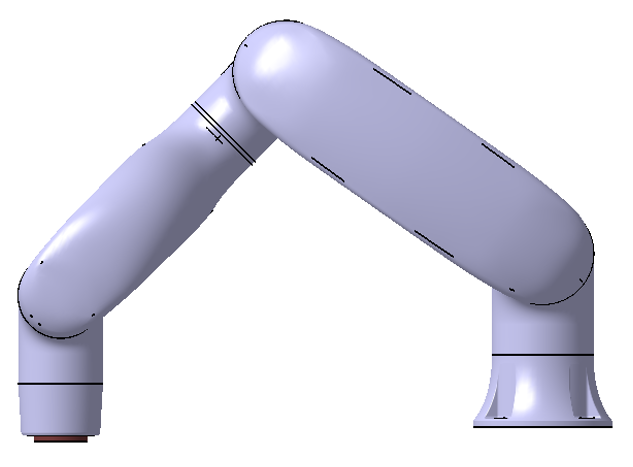
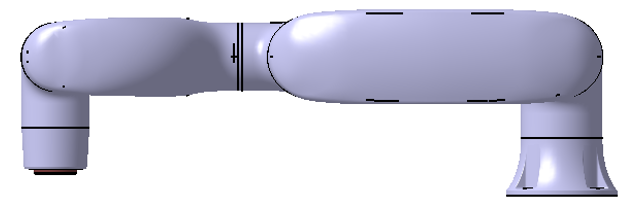
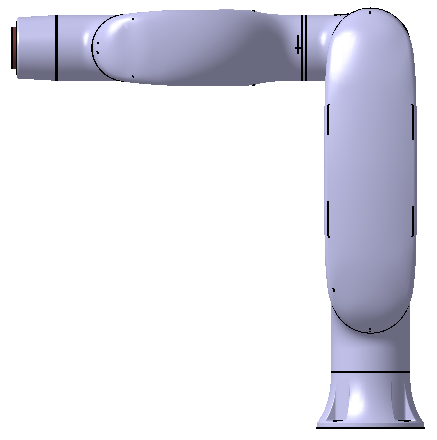
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
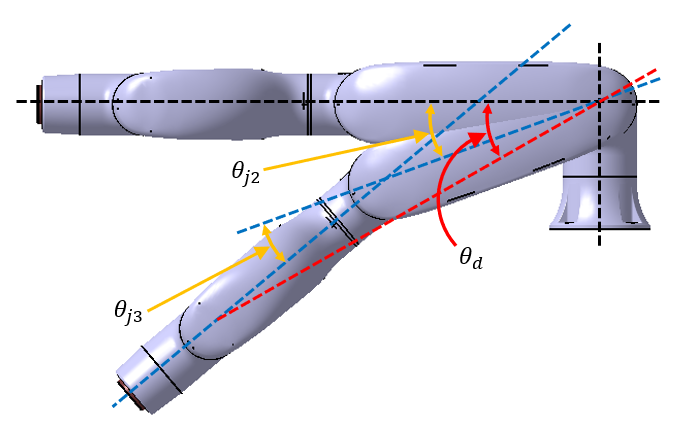
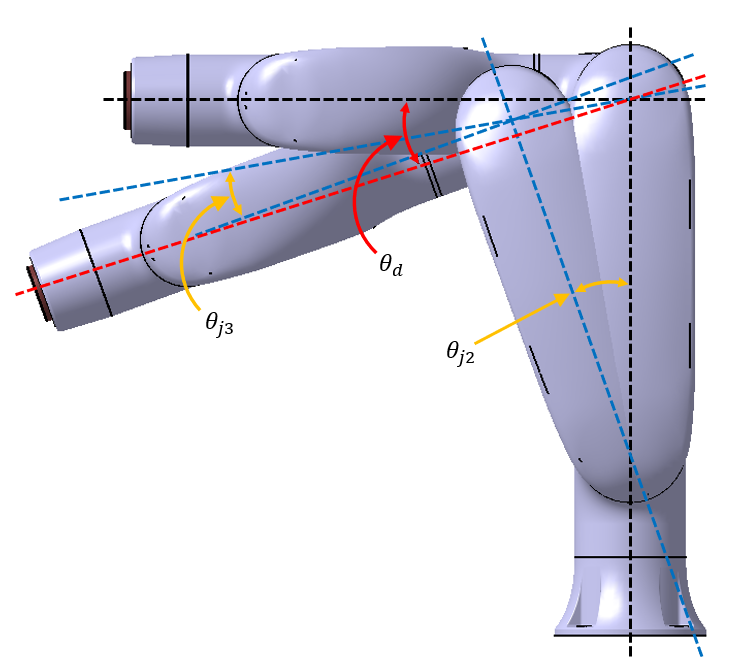
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.