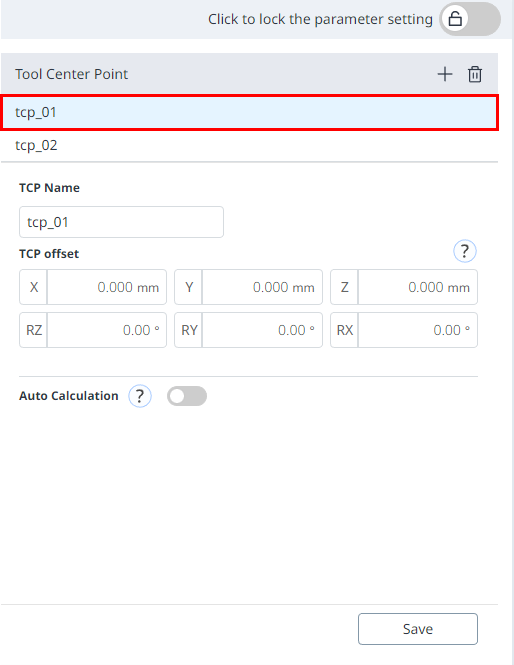
Werkzeugmittelpunkt
Beim Konfigurieren des Werkzeugmittelpunkts (TCP) müssen auch die Position und der Rotationswinkel basierend auf den Flanschkoordinaten definiertwerden. Zu diesem Zeitpunkt ist der Abstand vom standardmäßigen Startpunkt der Flanschkoordinate zum Werkzeugmittelpunkt(TCP) inder X-Achse, Die Y- und Z-Richtung kann nicht größer als 10000 mmsein .Beachten Sie auch, dass Kraftsteuerung , Compliance 
Wenn der Werkzeugmittelpunkt (TCP) mit der Option Automatische Berechnung konfiguriert wurde, wird die Berechnung nur auf der Grundlage der X-, Y- und Z -Positionen durchgeführt. Daher muss der Rotationswinkel eingegebenwerden. Der Rotationswinkel kann mit RZ, RY und RX definiert werden und basiert auf der Rotationsmethode „Euler Z-Y-Z“ .
Die Definitionen der Koordinatenachse, ausgedrückt durch x, y, z , und der Koordinatenachse, ausgedrückt durch X, Y, Z , lauten wie folgt:
- Koordinatenachse der ‚Flanschkoordinate‘ (x, y, z): Die Koordinatenachsenrichtung der „Flanschkoordinate “, die am Ende des Flansches definiert ist, ist identisch mit der Roboterkoordinate, wenn der Winkel der Roboterverbindung des Roboters ( 0,0,0,0,0,0) ist.
- Koordinatenachse der ‚TCP-Koordinate‘ (X, Y, Z): Diese Einstellung erfolgt am Ende oder am Arbeitspunkt des Werkzeugs, das am Ende des Flansches montiertist . Zu diesem Zeitpunkt wird der Rotationswinkel der „ TCP-Koordinate “ anhand der „Flanschkoordinate “ inder Reihenfolge 1) bis 3) der folgenden Werte definiert:
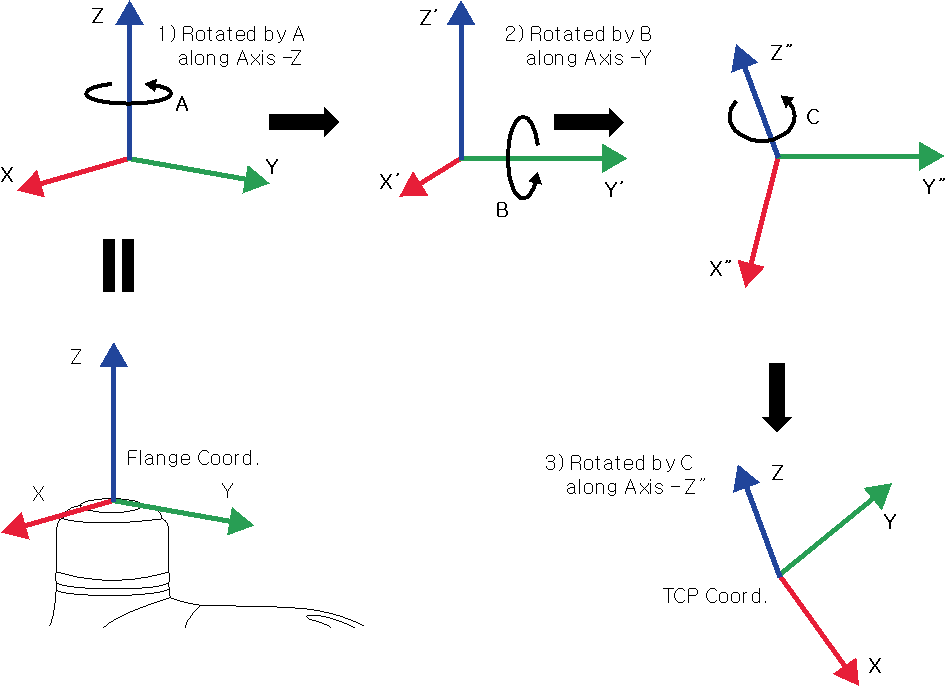
1) Drehen Sie Um Einen Grad entlang der Z -Achse der Flanschkoordinate.
2) Drehen Sie B Grad entlang der y’ -Achse der gemäß 1 gedrehten Koordinate).
3) Drehen Sie C Grad entlang der z’’’-Achse der gemäß 2 gedrehten Koordinate).
Im Folgenden finden Sie einige Beispiele für die Konfiguration der TCP gemäß der oben beschriebenen Methode:
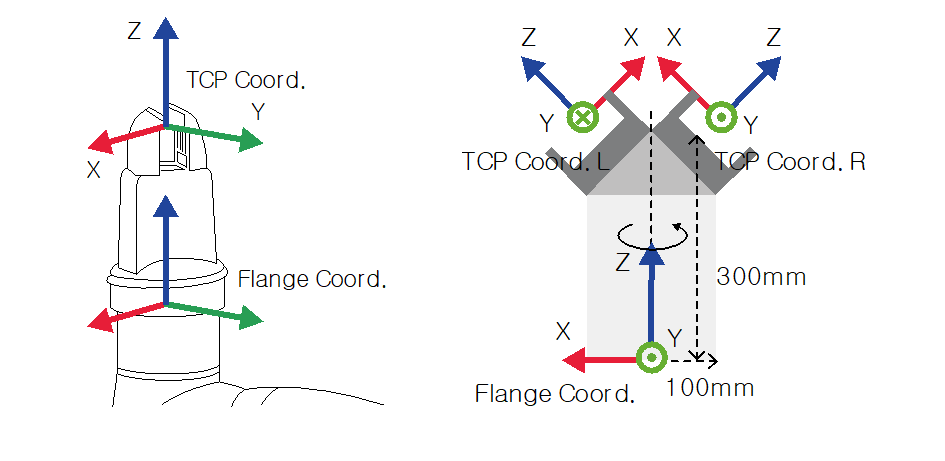
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Allgemeiner Greifer mit nur Z-Richtung-Offset (TCP-Koordinate)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Linker Greifer mit 45-Grad-Winkel (TCP-Koordinate L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Rechter Greifer mit 45-Grad-Winkel (TCP-Koordinate R)
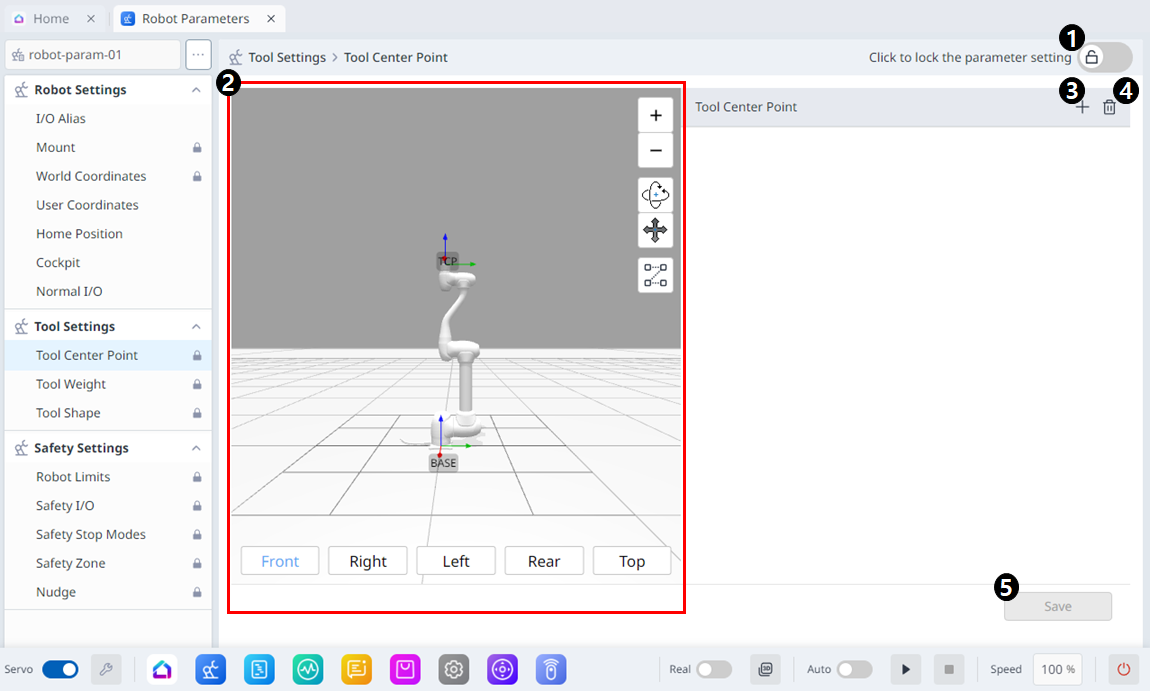
| Artikel | Beschreibung | |
|---|---|---|
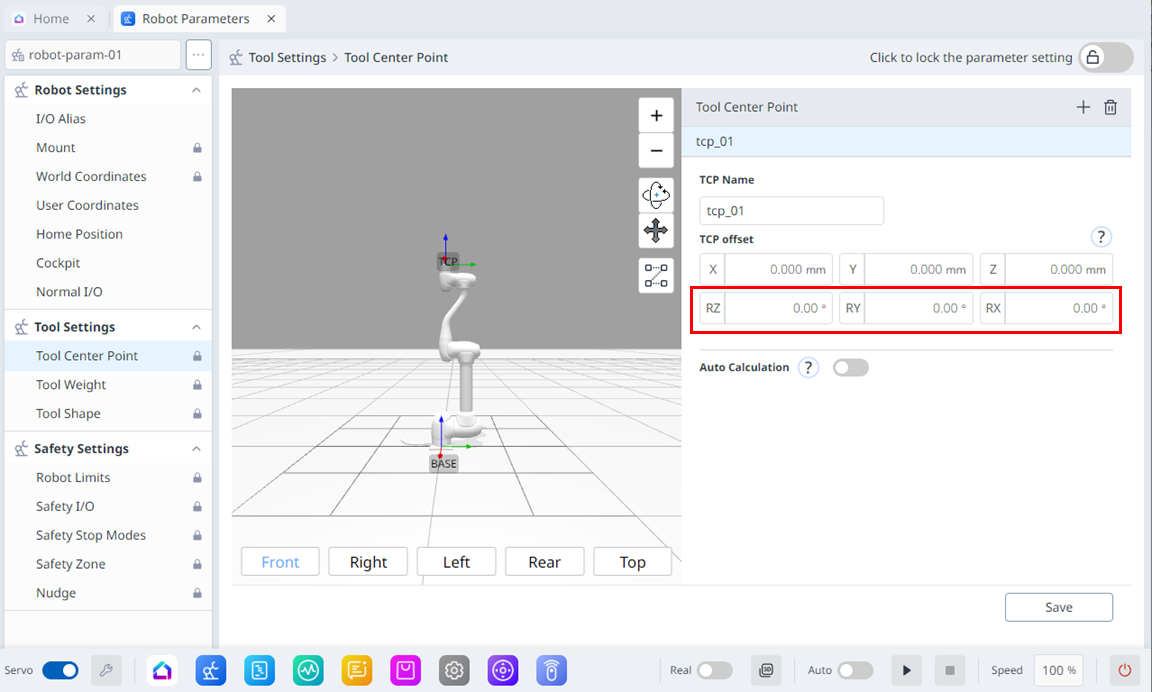
| 1 | Sperrschaltfläche | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den Wert zu ändern. |
| 2 | 3D-Simulation | Hier kann der konfigurierte Werkzeugmittelpunkt simuliert werden. |
| 3 | Hinzufügen | Mit dieser Schaltfläche können Sie TCP hinzufügen. |
| 4 | Löschen | Mit dieser Schaltfläche können Sie die ausgewählte TCP löschen. |
| 5 | Speichern | Mit dieser Taste können die Einstellwerte gespeichert werden. |
Wenn die Einstellungen gesperrt sind, wird der folgende Bildschirm angezeigt.
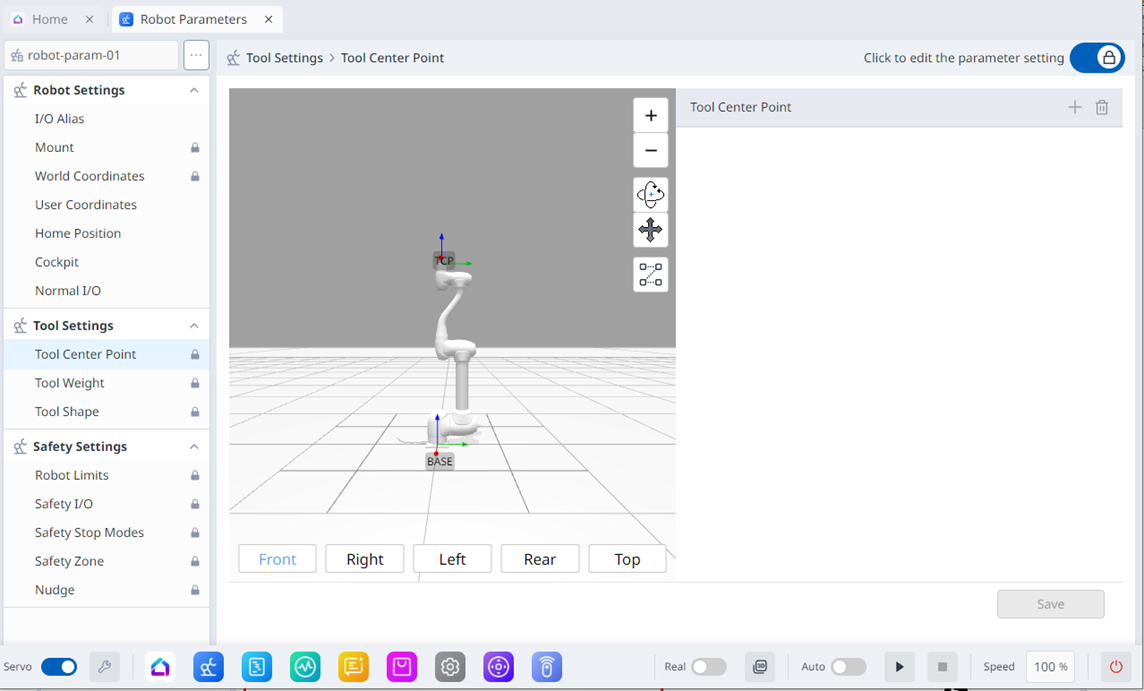
Zu diesem Zeitpunkt wird die ausgewählte TCP in Blau angezeigt, wie unten dargestellt.