
Controller-E/A-Verbindung
Die E/A-Anschlüsse des Steuergeräts können verwendet werden, um andere externe Geräte als Manipulatoren und Programmierhandgerät an das Steuergerät anzuschließen. Zusätzlich zu Sicherheitsvorrichtungen wie Not-aus-Schalter, Lichtschranke und Sicherheitsmatten können verschiedene Peripheriegeräte angeschlossen werden, die für die Konfiguration einer Roboterarbeitszelle erforderlich sind, wie pneumatische Magnetventile, Relais, SPS und Förderbandkodierer.
Die Controller -E/A ist wie folgt organisiert.
- Anschlussklemmenblock für Sicherheitskontakteingang (TBSFT): Zum Anschluss von Geräten, die für Not-aus und Not-aus erforderlich sind
- Anschlussklemmenblock für digitale E/A -Leistung (TBPWR)
- Konfigurierbarer digitaler E/A-Block (TBCI1- 4, TBCO1- 4): Zum Anschluss von Peripheriegeräten, die für den Roboterbetrieb erforderlich sind
- Analoger E/A -Anschlussblock (TBAIO)
- Anschlussklemmenblock für Encoder-Eingang (TBEN1, TBEN2)
- Klemmenblock für Sicherheitskontaktausgang (TBSTO): Zum Anschluss an die Stromversorgungsleitung der Peripheriegeräte des Roboters und zum Stoppen des Roboters, wenn er in den STO-Status wechselt, indem auch die Stromversorgung der Peripheriegeräte unterbrochen wird
Die folgende Abbildung zeigt die Anordnung der elektrischen Schnittstelle im Inneren des Steuergeräts.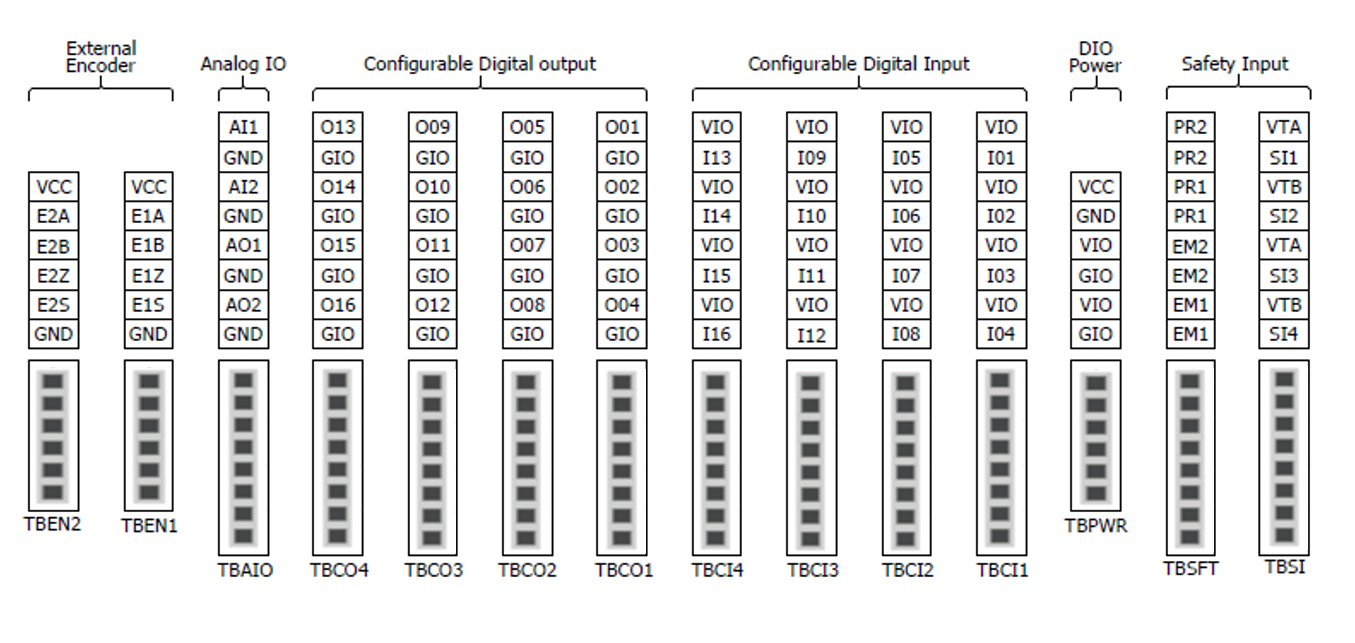
Vorsicht
- Um das Risiko von Schäden und Fehlfunktionen des Produkts zu vermeiden, schalten Sie die Stromversorgung aus, wenn Sie Klemmen an die Controller-E/A anschließen
- Doosan Robotics übernimmt keine Entschädigung für Schäden am Produkt, die durch unsachgemäßen Anschluss von Anschlüssen oder Fahrlässigkeit des Benutzers entstehen.
- Achten Sie beim Abschalten der Stromversorgung des Controllers darauf, auch die externe Stromquelle auszuschalten.