
Auf Basis der Roboterverbindung ausführen
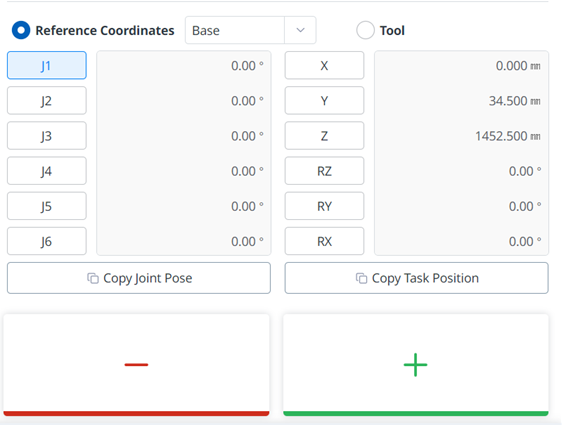
Um den Winkel basierend auf der Roboterverbindung anzupassen, gehen Sie wie folgt vor:
- Wählen Sie die Achse (J1-J6) aus, um den Winkel auf dem Verbindungsfeld anzupassen.
- Halten Sie die Richtungstasten (


