
Was ist Singularität?
Singularität in einem Multi-Joint-Roboter bezieht sich auf eine Position (oder einen Punkt), an der der Roboter Schwierigkeiten hat, seine nächste Position während der Bewegung zu berechnen. Multi-Joint-Roboter berechnen jeden Gelenkwinkel während der Bewegung basierend auf dem Roboterende
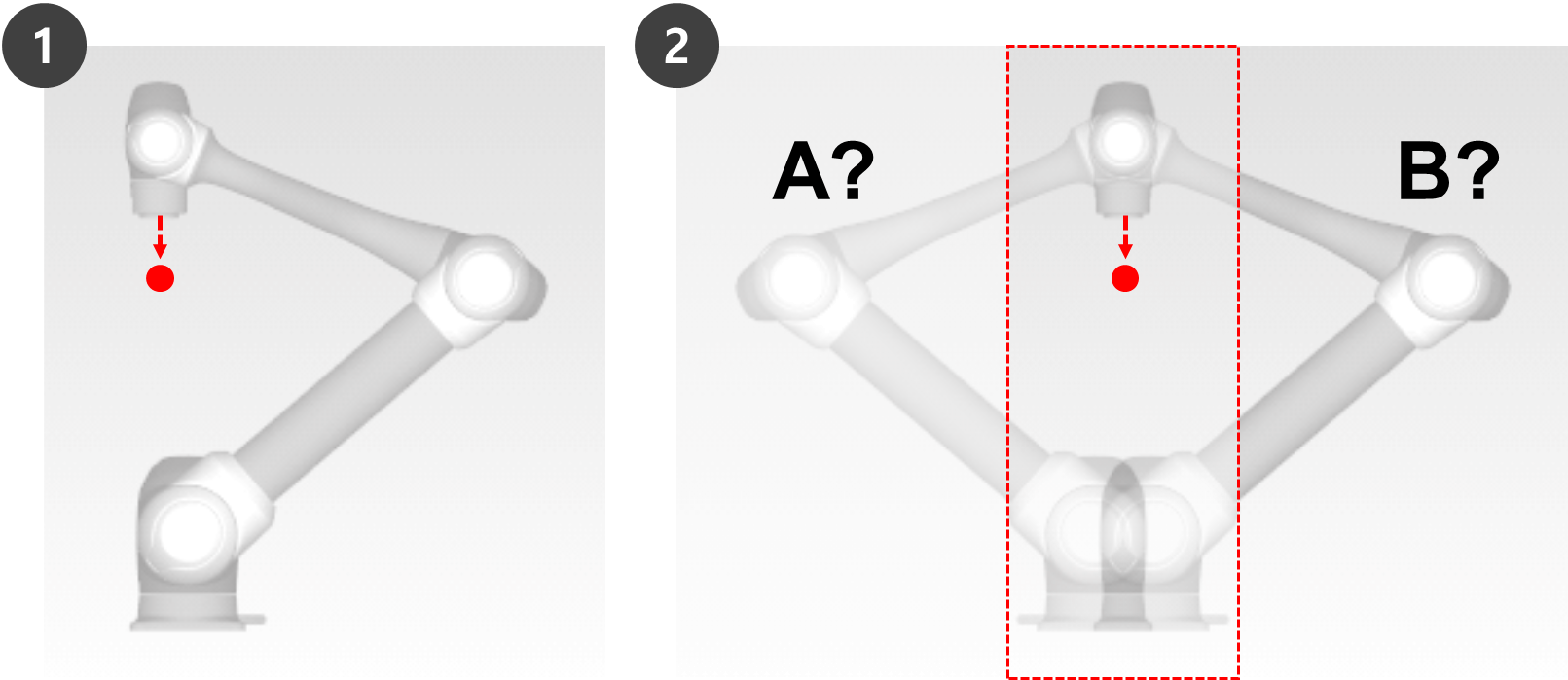
Zum Beispiel in Abb. 1 Wenn sich der Roboter weiter unten zum roten Punkt bewegt, kann er nicht bestimmen, ob er seine Gelenke zur Einstellung von Pose A oder Pose B bewegen soll, wie in Abb. 2. Diese Position (oder Punkt) wird Singularität genannt.
In der Nähe einer Singularität ist die Bewegung des Roboters in Bezug auf Ebene, Punkt und Linie nicht flüssig, die lineare Bewegung des Roboterendes wird möglicherweise nicht aufrechterhalten und die Positionsfehler während der Steuerung können sich erhöhen. Singularität tritt in drei Fällen auf, wie in der folgenden Abbildung gezeigt, einschließlich wenn die Robotergelenke eine Linie bilden.
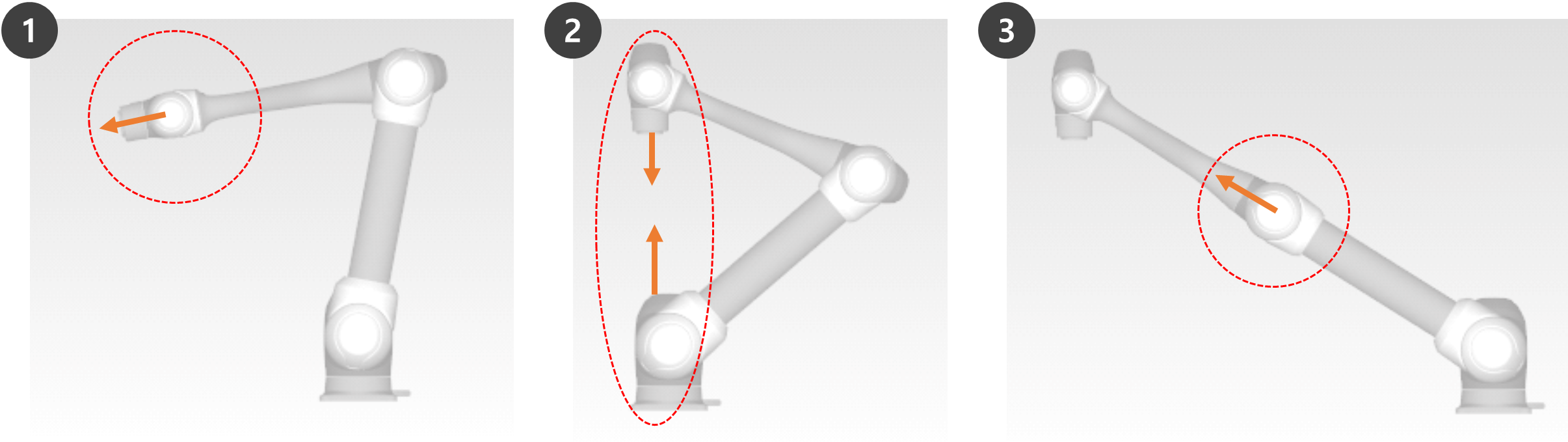
Singularität Am Handgelenk: Wenn das Handgelenk des Roboters eine Linie bildet, während sich die Achse 5 0º nähert
- Im Vergleich zu einem menschlichen Arm entsprechen die Achsen 4, 5 und 6 dem Handgelenkgelenk.
- Schultersingularität: Wenn sich die Achsen 1 und 6 auf derselben Linie befinden
- Im Vergleich zu einem menschlichen Arm entsprechen die Achsen 1 und 2 dem Schultergelenk.
- Winkelstück Singularität: Wenn der Roboter eine Linie bildet, während sich die Achse 3 0º nähert
- Im Vergleich zu einem menschlichen Arm entspricht Achse 3 dem Ellenbogen.
Vorsicht
Manuelle und automatische Vorgänge, die sich mit Gelenkrotation bewegen, werden nicht durch Singularität beeinflusst.
- Aufgabenbewegung, Movel-Befehl usw.
- Singularität tritt nur im manuellen und automatischen Betrieb auf, wo der Roboter die lineare Bewegung beendet.
- Gelenkbewegung, MoveJ-Befehle usw.
- In der Singularitätszone ist die Force Control oder Compliance Control nicht verfügbar.
- Da die Rotationsgeschwindigkeit bestimmter Achsen schnell zunimmt, wenn eine lineare Bewegung eine Singularität passiert, ist es möglich, dass eine Überschreitung der Verbindungsgeschwindigkeit oder eine Überschreitung der Verbindungswinkelgrenze auftritt.
So vermeiden Sie Singularität
Doosan Robotics Roboter bieten Optionen, um Singularitäten während der Bewegungssteuerung zu vermeiden. Es wird jedoch empfohlen, eine Aufgabe zu konfigurieren, die keine Ausnahmen mithilfe von gemeinsamen Bewegungsbefehlen wie MoveJ in Singularitätszonen erstellt.