
Einstellung der World-Koordinaten
Es besteht die Möglichkeit, ein Koordinatensystem für die Darstellung von Roboter und Werkstück festzulegen. Dieses Koordinatensystem wird World-Koordinaten genannt. Es ist nicht mit den Basiskoordinaten identisch, die fest an den Fuß des Roboters gebunden sind. Es ist möglich, die Stellung der Basiskoordinaten mit World-Koordinaten festzulegen. Die World-Koordinaten können beim Einlernen und Bewegen des Roboters in „Task Builder“ (Aufgabenstruktur erstellen) und „Task Writer“ (Aufgabe schreiben) ausgewählt werden. Um die World-Koordinaten festzulegen, die Schaltfläche 
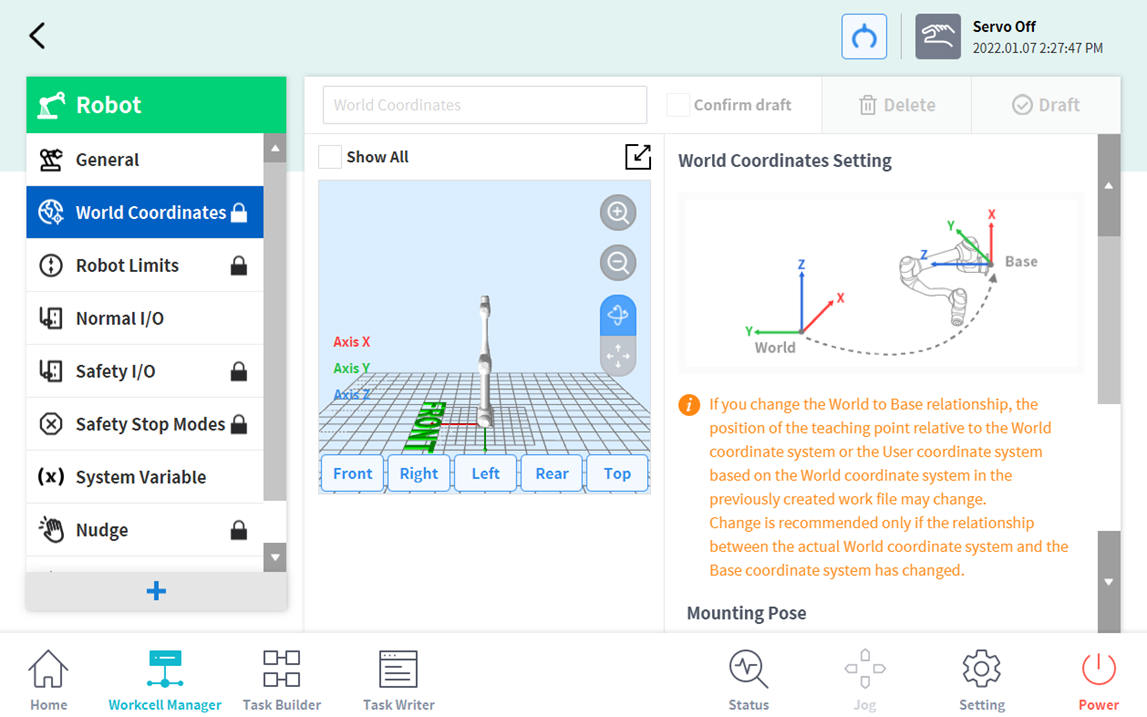
- Die Schaltfläche „Edit“ (Bearbeiten) im oberen Bereich antippen.
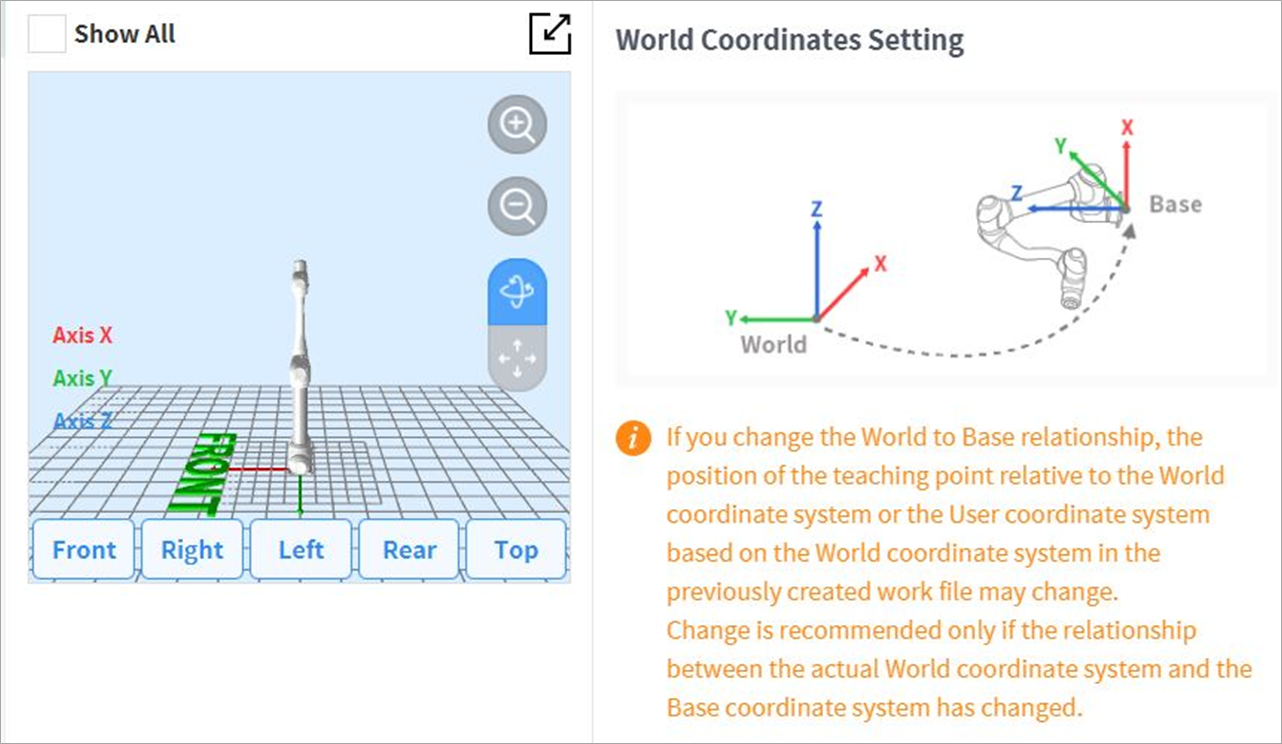
Weitere Informationen finden Sie in der Abbildung, die die Beziehung zwischen World-Koordinaten und Basiskoordinaten veranschaulicht, sowie in den zugehörigen Hinweisen.
Warnung
Bei Änderung der Beziehung zwischen World- und Basiskoordinaten kann sich der Einlernpunkt von World-Koordinaten oder Benutzerkoordinaten, die auf World-Koordinaten basieren, ändern. Es wird empfohlen, Änderungen nur dann durchzuführen, wenn sich die tatsächliche Beziehung zwischen World-Koordinaten und Basiskoordinaten ändert.
- Die Montagestellung (Installationsneigung) wird rechts in der Mitte angezeigt. World-Koordinaten beschreiben im Allgemeinen die Arbeitsumgebung aus der Perspektive des Benutzers. Die Z-Richtung der World-Koordinaten zeigt daher nach oben (Richtung Decke). Da eine Achse der Basiskoordinaten an der Fußebene des Roboters fixiert ist, ändert sich die Beziehung zwischen World-Koordinaten und Basiskoordinaten abhängig von der Installationsposition/-stellung des Roboters. Bei der obigen Abbildung wird davon ausgegangen, dass der Roboter an einer Wand installiert ist. In diesem Fall verläuft die Z-Achse der Basiskoordinaten senkrecht zur Wand, die parallel zur Y-Achse der World-Koordinaten verläuft. Neigung und Drehung der Montagestellung werden als 90 bzw. 0 Grad angezeigt. Die Beziehung zwischen World- und Basiskoordinaten ist als Beziehung der Basiskoordinaten basierend auf World-Koordinaten definiert. Bei einem vordefinierten Layout der Arbeitsumgebung müssen die Koordinaten entsprechend festgelegt werden. Die Werte der mittleren X/Y/Z-Bewegung und die Werte der mittleren A/B/C-Drehung basieren auf der Eulerschen Z-Y-Z-Definition. Wenn die Montagestellung der Installationsstellung des Roboters entsprechend festgelegt ist, kann der Rotationswinkel von B/C als B/C der Montagestellung verwendet werden. Wenn die Montagestellung jedoch mit der automatischen Annahmefunktion festgelegt wird, kann der Annahmewert eine Abweichung enthalten. Daher wird empfohlen, den für das jeweilige Layout definierten Rotationswinkel zu verwenden.
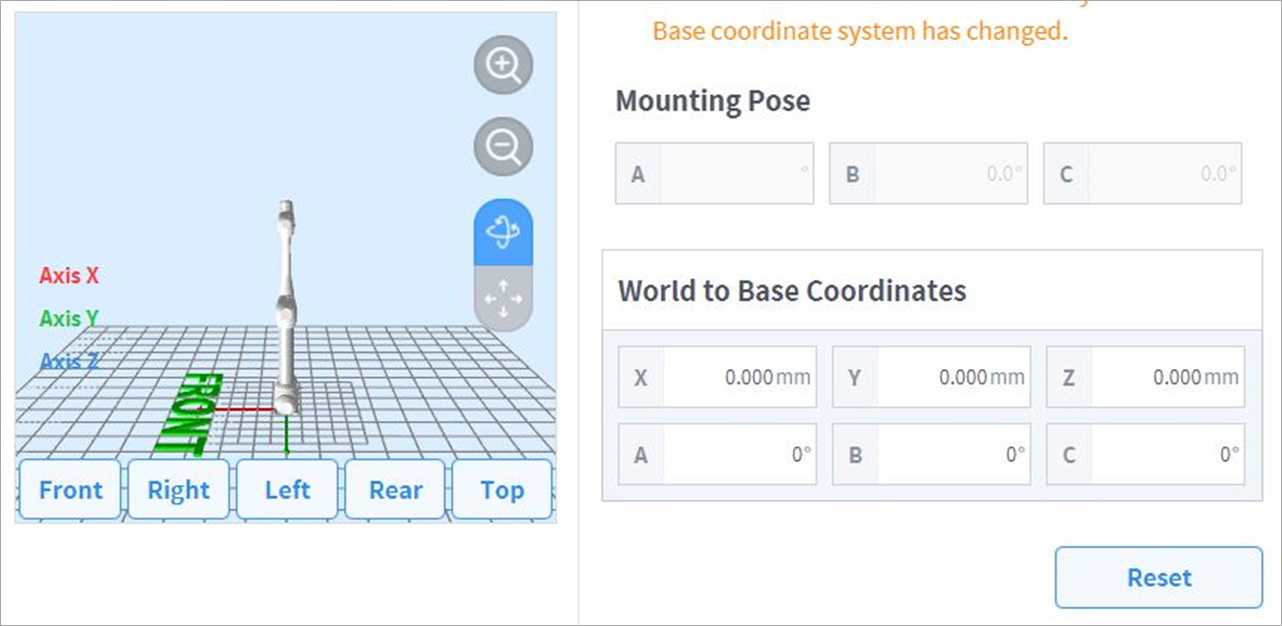
- Schaltfläche Apply (Übernehmen) antippen.
- Schaltfläche Confirm (Bestätigen) drücken.
Hinweis
Benutzerprogramme, die mit „Task Builder“ (Aufgabenstruktur erstellen) und „Task Writer“ (Aufgabe schreiben) erstellt werden, nachdem die Installationsneigung in Softwareversionen vor GF020400 übernommen wurde, müssen die World-Koordinaten bei einer Aktualisierung auf Softwareversionen nach GF020400 mit angewendeter Installationsneigung festlegen und alle Basiskoordinaten im Benutzerprogramm in World-Koordinaten umwandeln, damit vorhandene Einlernpunkte richtig verwendet werden.
Sofern mehrere Roboter in einem gemeinsamen Arbeitsraum arbeiten oder falls der Roboter an einem sich bewegenden Gerät installiert wird, wie ein mobiler Fuß oder eine lineare Schiene, so können sich der Zusammenhang und die Position des Anlernpunkts zwischen Werkstück und Roboterfuß verändern. In solchen Umgebungen lassen sich leicht einzulernende, zu bearbeitende und weiterzugebende globale Koordinaten einrichten.
Wenn ein Werkzeug installiert oder ersetzt wird, muss sein Gewicht konfiguriert werden, bevor der Roboter betätigt wird. Weitere Informationen zur Einstellung des Werkzeuggewichts siehe Einstellung für Werkzeuggewicht.