
Workcell Item – Roboterinstallationsposition hinzufügen (Mount)
OPTIONAL EINFACH 3 MIN
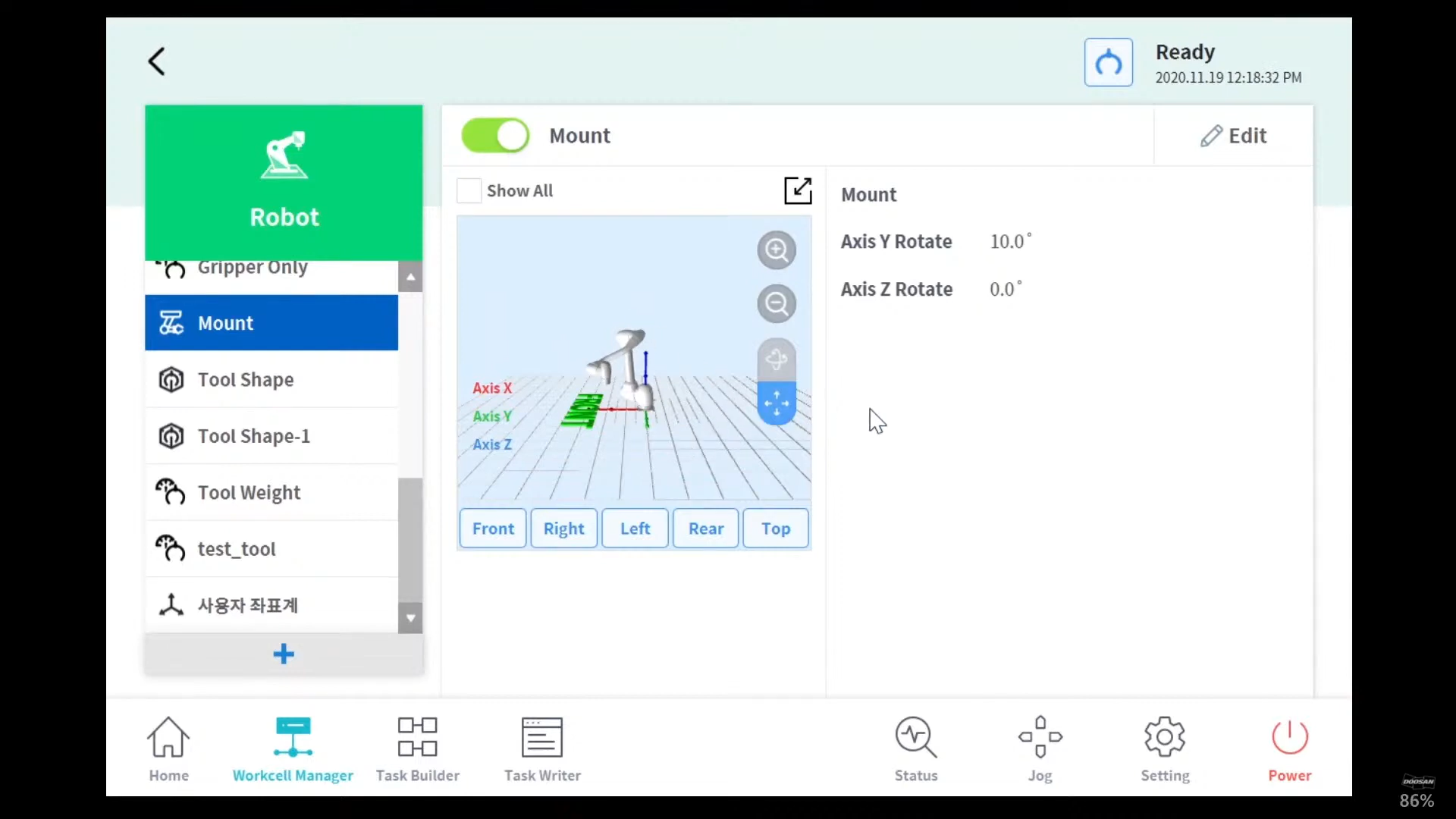
Die Roboterinstallationsposition kann durch Hinzufügen eines Roboterinstallationspots (Mount) Workcell Item eingestellt werden. Wenn der Roboter auf einer Ebenen Fläche installiert ist, kann dieser Schritt übersprungen werden.
Die Position der Roboterinstallation kann über Workcell Manager > Robot > 
- Der Einbauwinkel kann mit der automatischen Messfunktion gemessen werden. Wenn der Winkel jedoch weniger als 5 Grad beträgt, ist die automatische Messung nicht verfügbar.
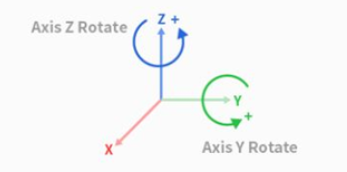
- Wird der Roboter an der Decke oder Wand montiert, kann der Einbauwinkel des Roboters mit Drehungen der Y- und Z-Achse eingestellt werden.
- Da die automatische Berechnung des Werkzeuggewichts auf der Grundlage der Schwerkraft durchgeführt wird, wird empfohlen, das Werkzeuggewicht nach der Einstellung der Montage zurückzusetzen.
Nachdem das Arbeitszellenelement registriert (bestätigt) wurde, muss der Umschalter aktiviert werden, damit das Arbeitszellenelement verwendet werden kann.
Vorsicht
- Beim Einstellen des Roboterinstallations-Pose (Mount) Workcell Item wird empfohlen, auch die Weltkoordinaten zu ändern. Wenn die Weltkoordinaten nicht geändert werden, wird die Roboterposition auf dem Bildschirm des Robotersimulators der Teach-Handstation angezeigt, wenn der Roboter auf der Ebenen Fläche (BASIC) installiert wird.