
Sub-/Call-Sub Verwenden
OPTIONAL NORMAL 5 MIN
Sub ist eine Abkürzung für Subroutine. Ein Unterprogramm bezieht sich auf einen Prozess, der die Anzahl der Schritte in einem Programm minimiert, indem notwendige Teile aufgerufen werden, wenn zwei oder mehr doppelte Teile vorhanden sind.
- Doosan Robotics-Roboter stellen einen CallSub-Befehl zum Aufrufen von Sub-Befehlen und den entsprechenden Sub-Absatz bereit.
- Der Sub-Befehl funktioniert wie in Python definiert.
Hinweis
- Unterabsatz muss in MainSub, dem Anfang eines Hauptabsatzes, und EndMainSub, dem Ende eines Hauptabsatzes, hinzugefügt werden.
- Neben der Wiederholung wird der Unterbefehl auch verwendet, um einen Hauptabsatz zu vereinfachen. Die Verwendung eines Unterbefehls ermöglicht eine intuitive Identifizierung der Aufgabe eines Hauptabsatzes, die derzeit ausgeführt wird.
- Mithilfe eines Unterbefehls können Unterabsatzeinheiten getestet werden.
(YouTube)
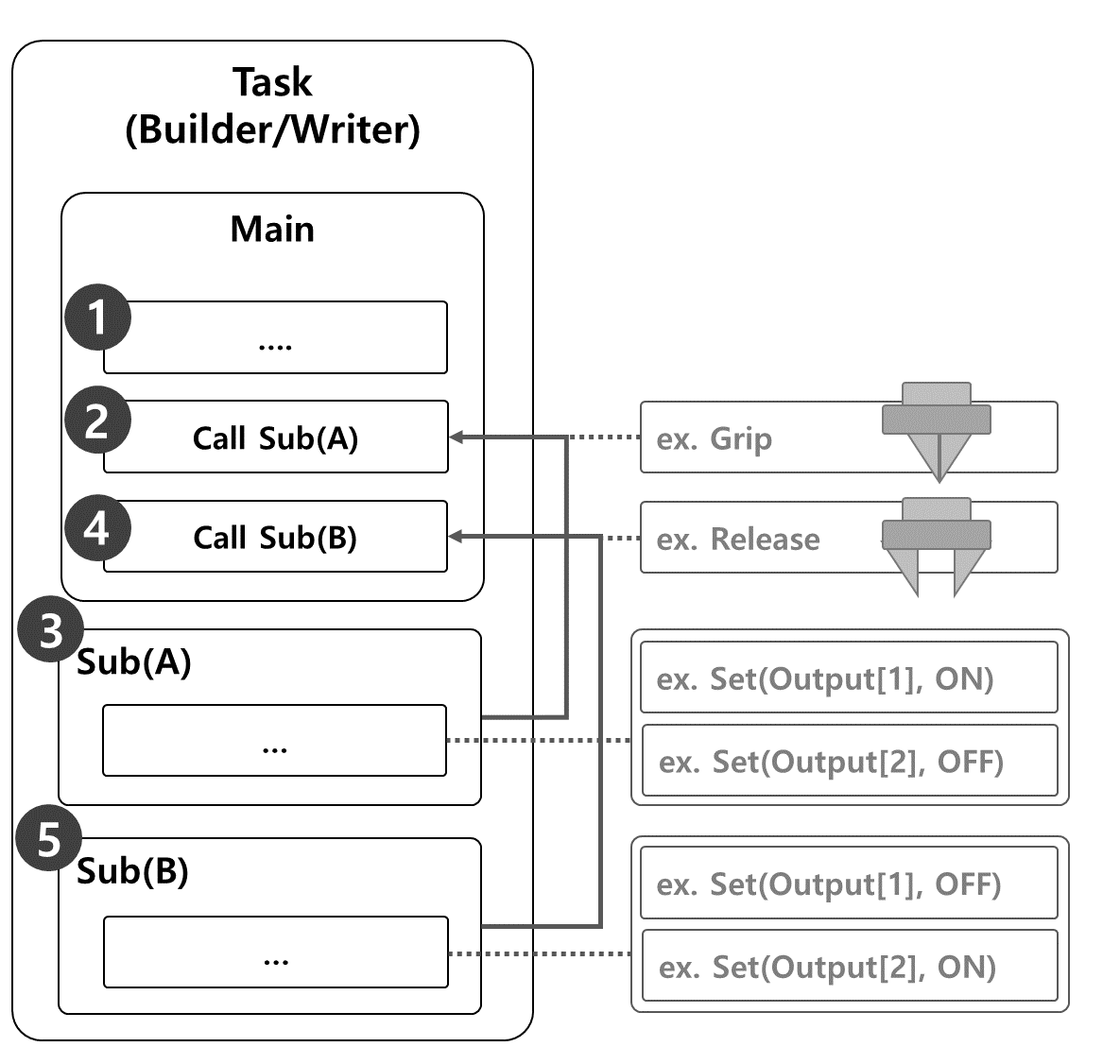
Die Probe, bei der ein Unterbefehl zum Ausführen von Greif- und Freigabebewegungen eines Robotergreifers verwendet wird, besteht aus den folgenden Elementen:
- Zeilen des Hauptabsatzes führen das Task-Programm in sequenzieller Reihenfolge ab der ersten Zeile aus.
- Nach Sub(A) verschieben, der von Call Sub aufgerufen wird.
- Probe
- Programm: Rufen Sie das Unterprogramm Grip auf.
- Roboter: Keine Bewegung.
- Probe
- Sub(A) wird ausgeführt. Alle Unterabsatzzeilen werden nacheinander ausgeführt, kehren zum Hauptabsatz zurück und führen die nächste Zeile aus.
- Probe
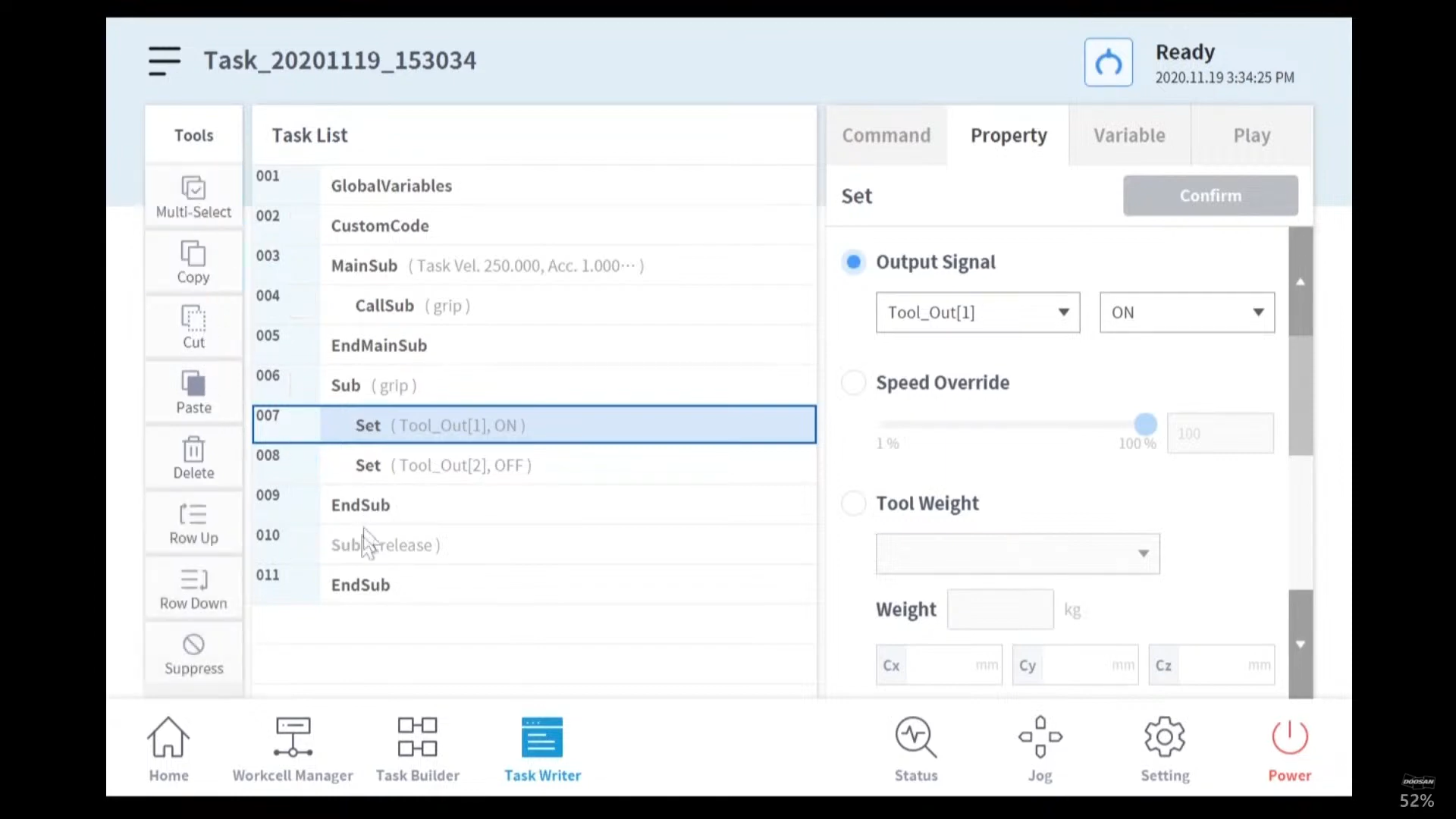
- Programm: Führen Sie die Unterroutine Grip in der Reihenfolge aus. Verwenden Sie den Befehl Set, um Ausgang [1] auf EIN und Ausgang [2] auf AUS zu setzen.
- Roboter: Der Robotergreifer führt die Grip-Bewegung aus.
- Probe
- Nach Sub(B) verschieben, der von Call Sub aufgerufen wird.
- Probe
- Programm: Rufen Sie das Unterprogramm Release auf.
- Roboter: Keine Bewegung.
- Probe
- Sub(B) wird ausgeführt. Alle Unterabsatzzeilen werden nacheinander ausgeführt, kehren zum Hauptabsatz zurück und führen die nächste Zeile aus.
- Probe
- Programm: Führen Sie die Unterroutine Grip in der Reihenfolge aus. Verwenden Sie den Befehl Set, um Ausgang [1] auf AUS und Ausgang [2] auf EIN zu setzen.
- Roboter: Der Robotergreifer führt die Freigabebewegung aus.
- Probe
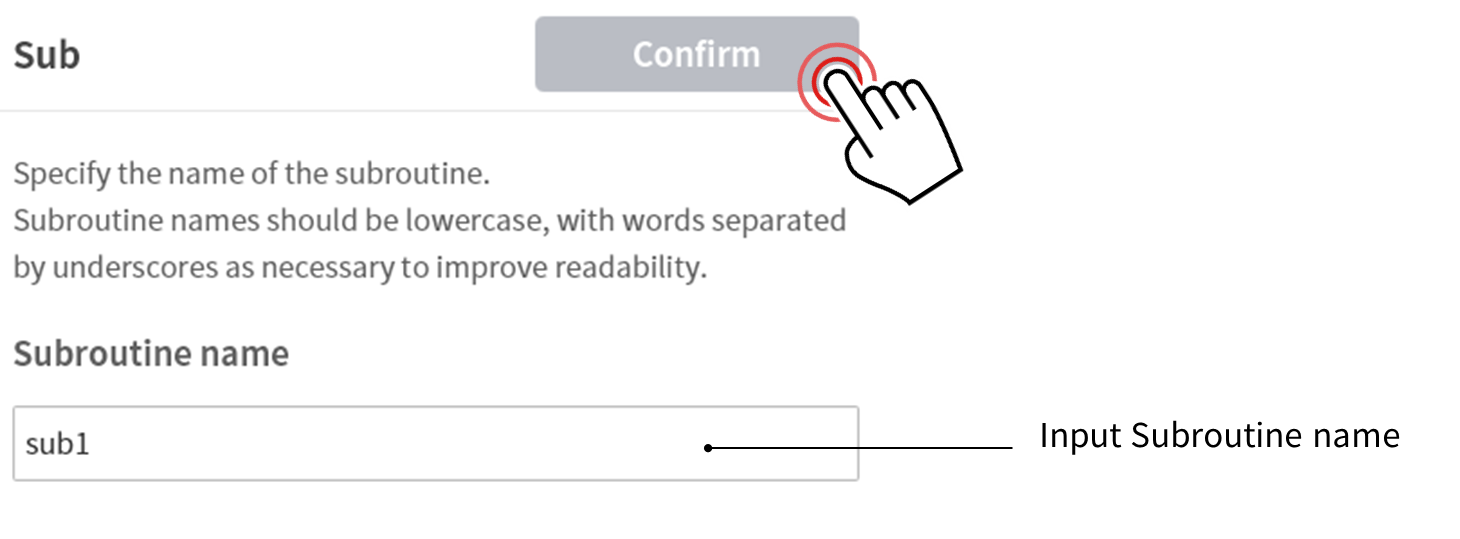
Unterbefehl hinzufügen
- Fügen Sie den Unterbefehl aus dem Task Builder oder dem Task Writer hinzu.
- Geben Sie den Namen des Unterroutinen ein.
- Fahren Sie mit Bestätigen fort.
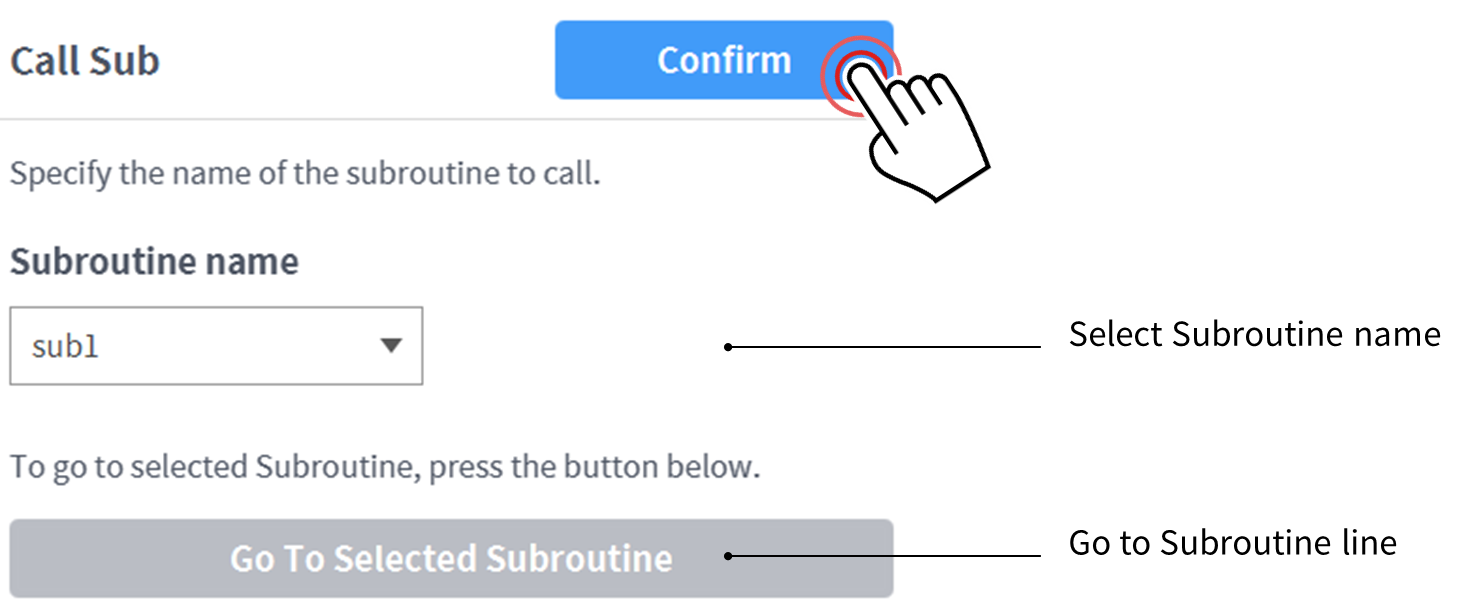
Befehl zum Hinzufügen von CallSub
- Fügen Sie den CallSub-Befehl aus dem Task Builder oder dem Task Writer hinzu.
- Wählen Sie den Namen des Unterroutinen aus, der mit dem Unterbefehl registriert wurde.
- Fahren Sie mit Bestätigen fort.
Hinweis
- Wenn die Anzahl der Zeilen im Aufgabenprogramm steigt, kann es schwierig werden, Unterprogramme zu finden. Berühren Sie in diesem Fall den Befehl Gehe zu ausgewähltem Unterprogramm in der Eigenschaft von CallSub, um den Fokus auf die entsprechende Unterbefehlszeile zu verschieben.