
Robotereinstellung - Weltkoordinaten Einstellen
OPTIONAL NORMAL 3 MIN
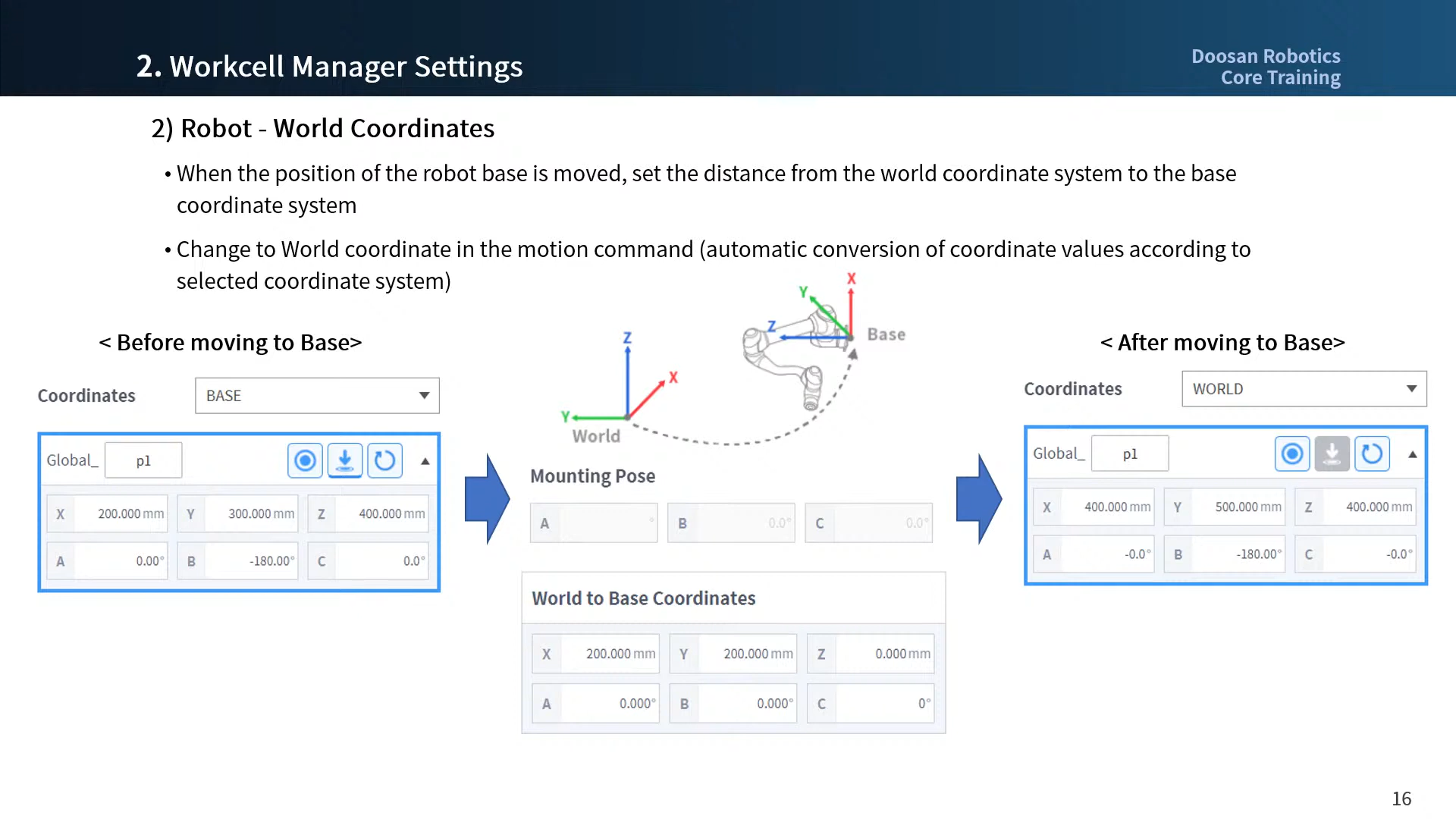
Die Weltkoordinaten des Roboters können aus den Weltkoordinaten eingestellt werden. Falls die Roboterkoordinate die Basiskoordinaten ist, kann dieser Schritt übersprungen werden.
Weltkoordinaten können über Workcell Manager > Roboter > Weltkoordinatenfestgelegt werden. Weitere Informationen finden Sie unter Weltenkoordinaten festlegen.
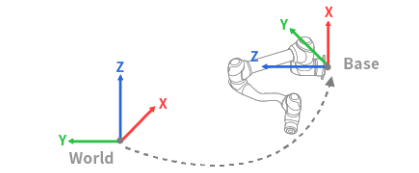
- Weltkoordinaten werden verwendet, wenn der Montageort der Roboterbasis physisch bewegt/gedreht wird.
- Wenn Sie die Weltkoordinaten ändern, wird die gleiche Bewegung/Drehung auf den Bildschirm des Robotersimulators angewendet.
Hinweis
Die Weltkoordinaten können auch verwendet werden, nachdem die Basisposition und der Winkel nach dem Roboterlernen geändert wurden. Wenn die Koordinaten von Aufgaben, die durch Roboterlernen in der Vergangenheit erstellt wurden, von BASIS zu WELT geändert werden, wird ein Offset, der der Bewegung/Drehung der Weltkoordinaten entspricht, auf alle Bewegungskoordinaten angewendet.