
Nachgiebigkeitsregelung und Kontaktprüfung
Die Funktionen für Nachgiebigkeitsregelung und Kontaktprüfung, d. h. der einzigartigen Kraftregelungstechnologie von Doosan Robotics, ermöglichen ein einfaches einmaliges Einlernen für die präzise Angabe von Punkten, da eine Positionsabweichung in einem bestimmten Toleranzbereich zwischen Werkstück und den umgebenden Objekten während des Roboterbetriebs zulässig ist.
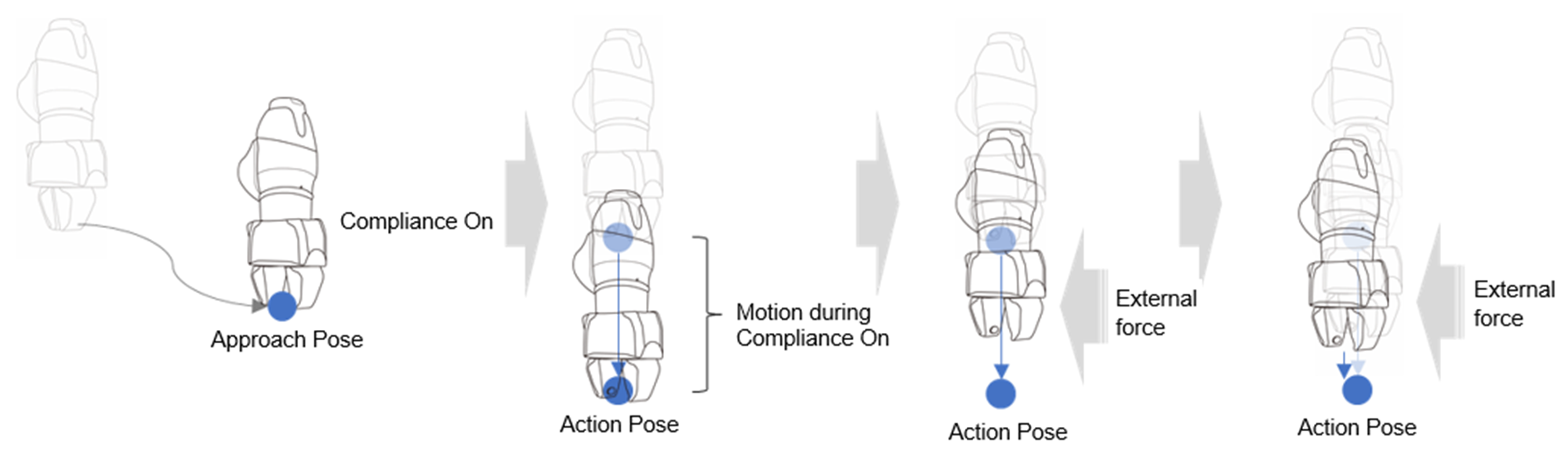
Compliance Control (Nachgiebigkeitsregelung): Falls bei Anfahren à Aktion à und Abfahren eine Kraft einwirkt, ist – wie bei einer Feder – eine Abweichung von der festgelegten Position mit einem gewissen Spielraum möglich.
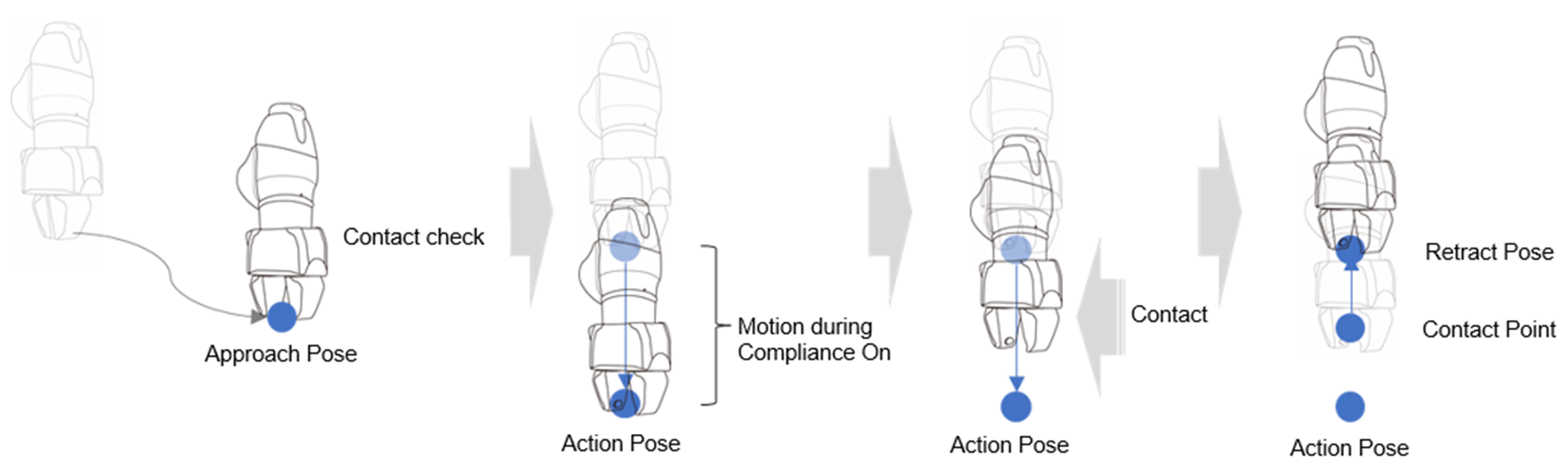
Contact Check (Kontaktprüfung): Diese Funktion erkennt abhängig von den eingegebenen Werten für Contact Force (Kontaktkraft) und Contact Determination Range (Kontaktermittlungsbereich) einen Kontakt mit dem Ziel, stoppt die Bewegung an der entsprechenden Position und aktiviert den Greifer, um das Ziel zu erfassen.
- Diese Funktion muss zusammen mit der Nachgiebigkeitsregelungsfunktion verwendet werden. Wenn eine Kraft (Force) eingegeben und die Nachgiebigkeitsregelung nicht aktiviert ist, tritt ein Fehler auf.
- Die Kontaktfunktion erkennt den Kontakt mit einer äußeren Kraft. Daher muss die Kollisionserkennung relativ unempfindlich eingestellt oder ganz deaktiviert werden.
- Bei Verwendung dieser Funktion ist äußerste Vorsicht geboten, da bei einer Berührung der externen Umgebung eine sehr große Kraft erzeugt werden kann, wenn der Wert für die Steifigkeit der Nachgiebigkeitsregelungsfunktion (d. h. z‑Richtung) zu groß oder die Arbeitsgeschwindigkeit zu hoch ist. (Abhängig von der jeweiligen Situation müssen Anpassungen vorgenommen werden, indem der Steifigkeitswert verringert wird, wenn die Arbeitsgeschwindigkeit zu hoch ist, bzw. indem die Steifigkeit erhöht wird, wenn die Arbeitsgeschwindigkeit zu gering ist.)
Hinweis
- Wenn FTS bei Verwendung der A-Serie nicht installiert ist, kann die Funktion für Kontakterkennung nicht verwendet werden. In diesem Fall ist die Verwendung der Nachgiebigkeitsregelung eingeschränkt, und die Steifigkeit kann nur in der Translationsrichtung (X, Y, Z) geändert werden.