Einstellung der Fernsteuerung
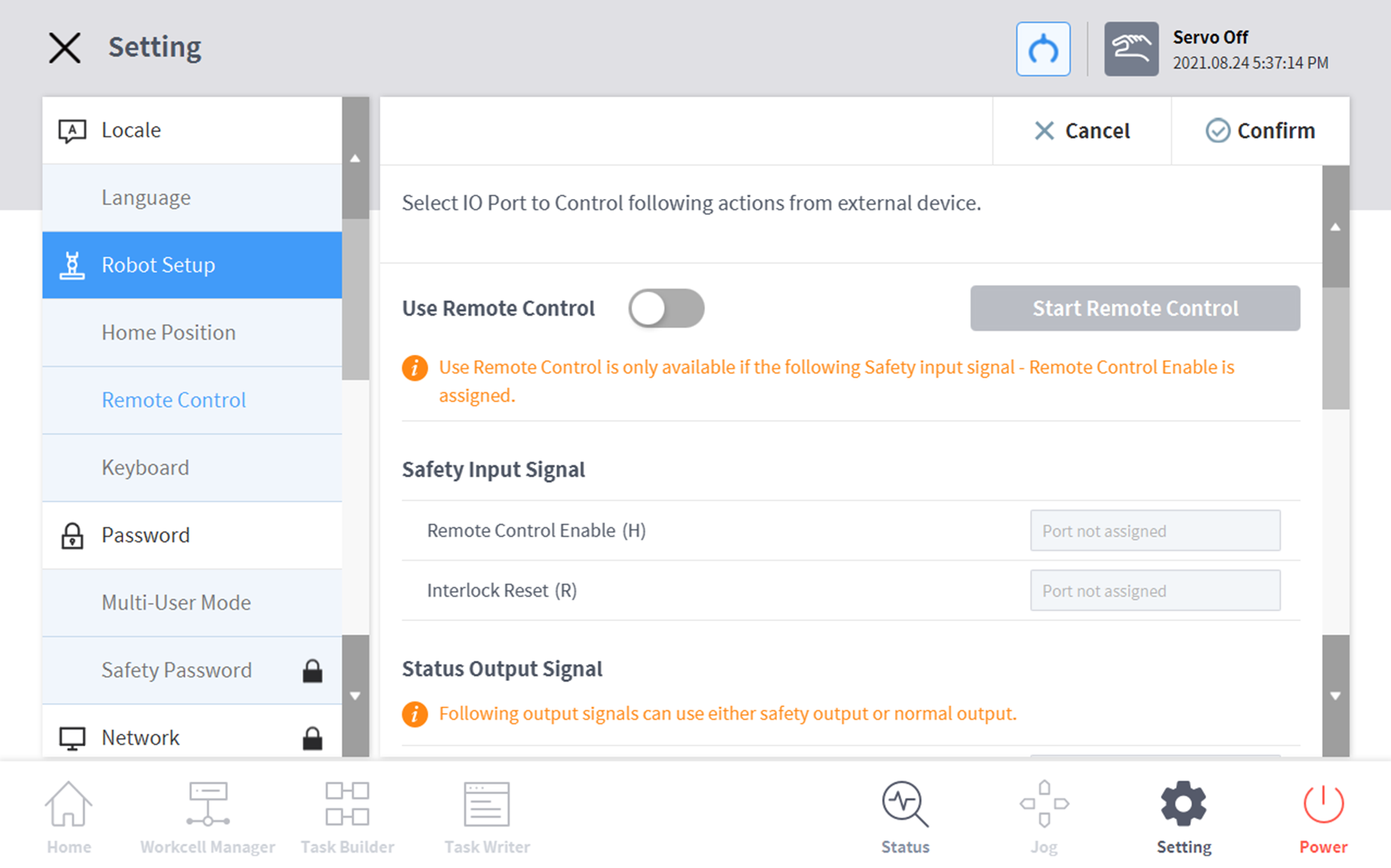
- Menü Remote Control (Fernsteuerung) unter Setting > Robot Setup (Einstellung > Robotereinrichtung) auswählen.
- Im Fenster für die Einstellungsverwaltung werden Informationen zu den aktuellen Einstellungen angezeigt.
- Die Schaltfläche Use Remote Control (Fernsteuerung verwenden) auf „ON“ (EIN) einstellen.
- Wird das System mit aktivierter Fernsteuerung neu gestartet, wird es im Fernsteuerungsmodus hochgefahren.
- Ausgangssignal, Eingangssignal und Werte für die Standardladeaufgabe eingeben.
- Diese Einstellungen können nicht konfiguriert werden, wenn das Eingangssignal nicht festgelegt ist. In Workcell Manager (Verwaltung der Installationsbereiche) > Safety I/O (Sicherheitseingang/-ausgang) > Registerkarte Input (Eingang), Edit (Bearbeiten) > Port (Anschluss) auswählen > Remote Control Enable (H) (Fernsteuerung aktivieren) konfigurieren.
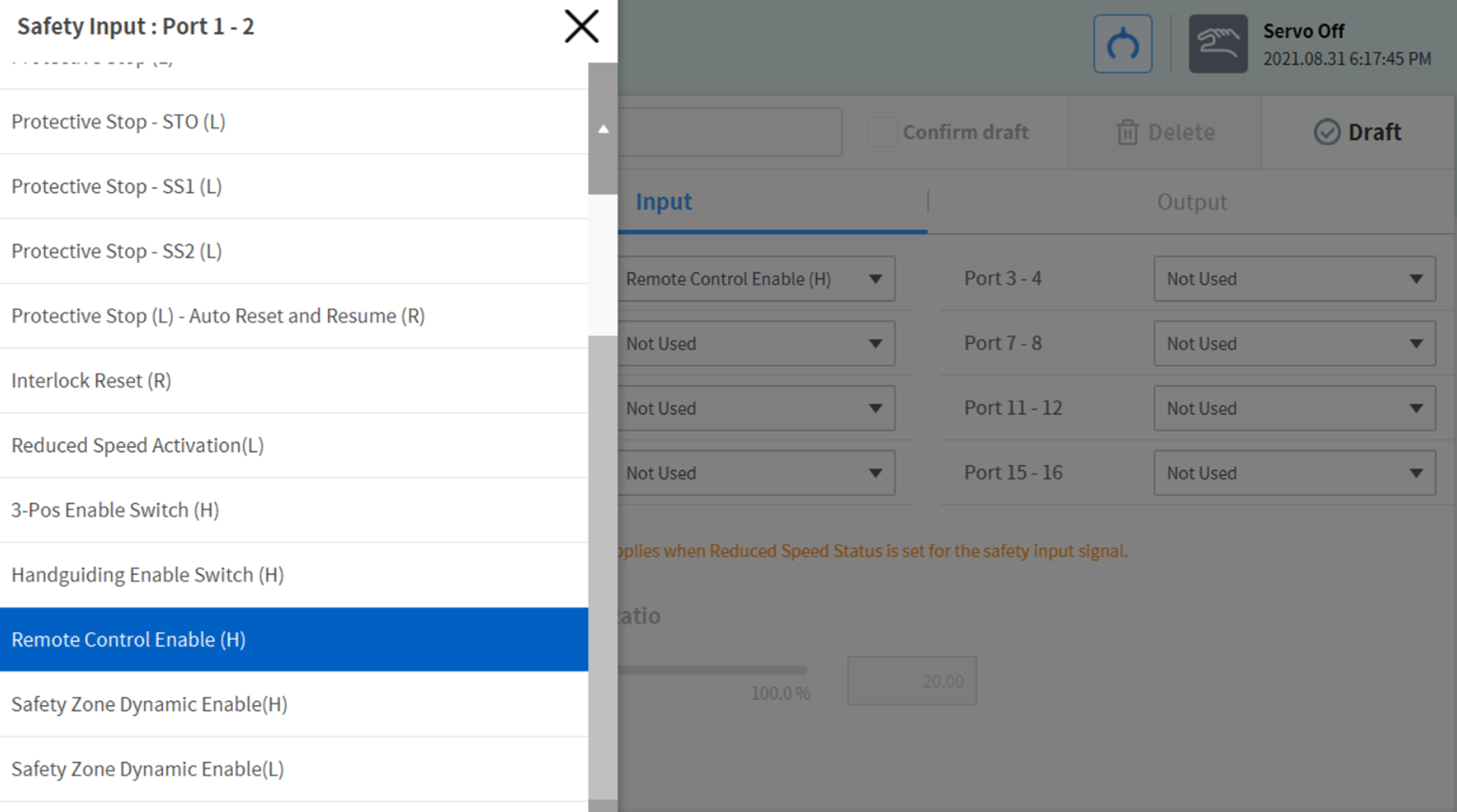
- Diese Einstellungen können nicht konfiguriert werden, wenn das Eingangssignal nicht festgelegt ist. In Workcell Manager (Verwaltung der Installationsbereiche) > Safety I/O (Sicherheitseingang/-ausgang) > Registerkarte Input (Eingang), Edit (Bearbeiten) > Port (Anschluss) auswählen > Remote Control Enable (H) (Fernsteuerung aktivieren) konfigurieren.
- Nach Abschluss die Schaltfläche Confirm (Bestätigen) antippen.
- Die Umgebungseinstellungen für die Fernsteuerung werden übernommen.
- Damit eine Fernsteuerung über ein externes Gerät möglich ist, die Schaltfläche Start Remote Control (Fernsteuerung starten) antippen, um den Fernsteuerungsmodus zu aktivieren.
- Daraufhin werden Informationen zu den Aufgaben angezeigt, die vom externen Gerät aus ausgeführt werden können.
- Bewegungseingaben vom externen Gerät können nur ausgeführt werden, wenn ein grünes Signal in der Schaltfläche „Enable Remote Control“ (Fernsteuerung aktivieren) angezeigt wird.
- Wird ein rotes Signal in der Schaltfläche „Enable Remote Control“ (Fernsteuerung aktivieren) angezeigt, muss ein Aktivierungssignal vom externen Gerät aus eingegeben werden.
Hinweis
- Eine Notausschaltung oder Schutzabschaltung im Fernsteuerungsmodus wird wie folgt behandelt:
- Not-Aus: Ein Not-Aus-Popup wird angezeigt. Nachdem die Ursache für die Notausschaltung beseitigt wurde, wird das Popup durch Ziehen oder Drehen des Not-Aus-Schalters zum Zurücksetzen automatisch geschlossen.
- Übergang in den Zustand Servo Off (Servo Aus) verursacht durch Schutzabschaltung: Ein rotes Schutzabschaltungs-Popup wird angezeigt. Wenn das Signal Servo On (Servo Ein) eingeht, nachdem die Ursache der Schutzabschaltung beseitigt wurde, werden die Servoantriebe des Roboters eingeschaltet und das Popup wird automatisch geschlossen.
- Übergang in den Zustand Interrupted (Unterbrochen) verursacht durch Schutzabschaltung: Ein gelbes Schutzabschaltungs-Popup wird angezeigt. Wenn das Signal Interlock Reset (Sperre zurücksetzen) eingeht, nachdem die Ursache der Schutzabschaltung beseitigt wurde, wechselt der Roboterzustand in den normalen Bereitschaftszustand: Manueller Standby, Autom. Standby oder HGC Standby.
Bei Sicherheitsverletzungen, deren Ursache nicht ohne Bewegung des Roboters beseitigt werden kann, kann Clamping Escape by cockpit (Festklemmen über das Steuerpult beseitigen) verwendet werden. - Einzelheiten zum Status für jeden Modus finden Sie unter „ Status- und Flansch-LED-Farbe für die einzelnen Modi”.
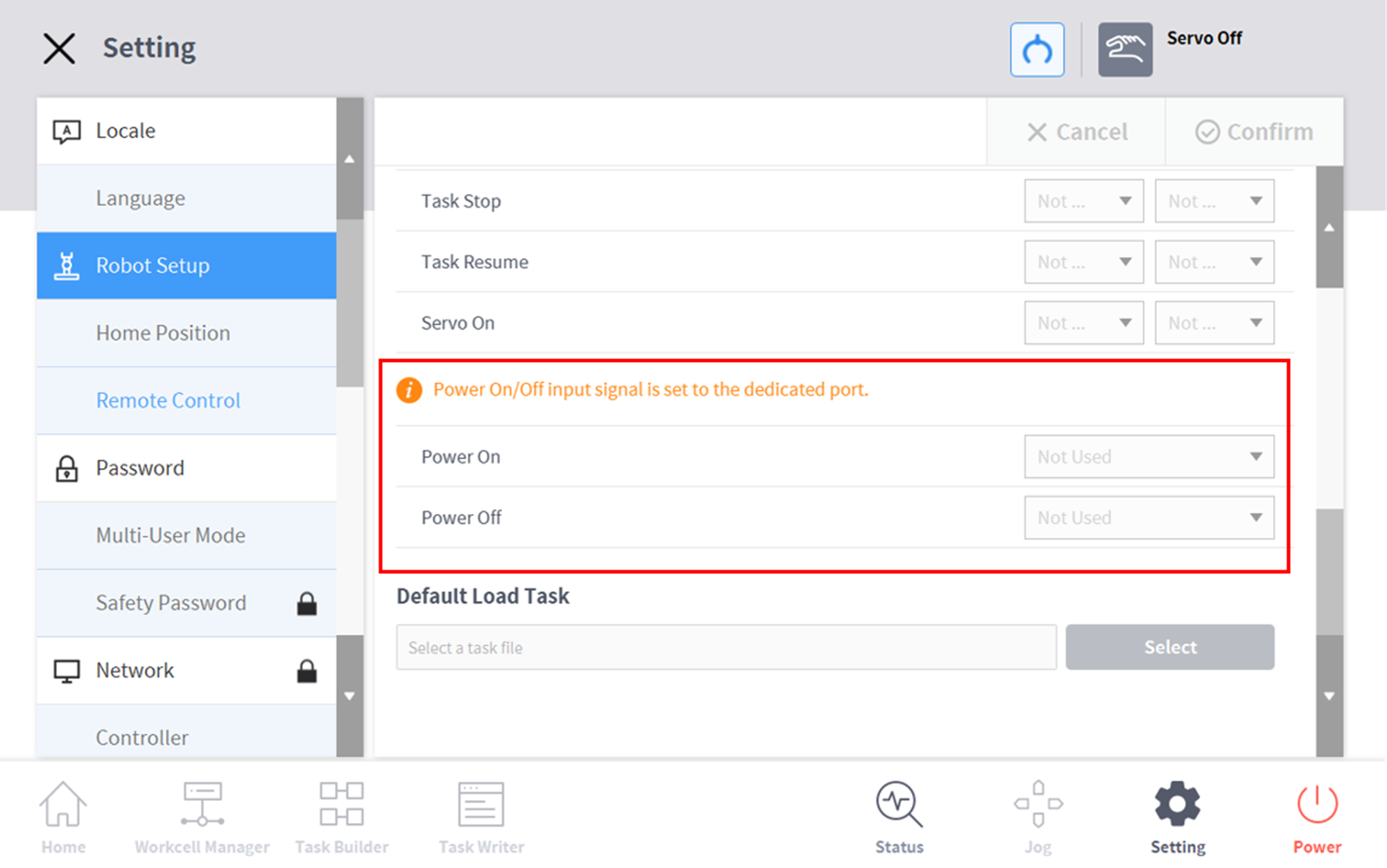
- Es ist möglich, die Stromversorgung des Roboters ferngesteuert ein-/auszuschalten:
- Im Hauptmenü die Schaltfläche „Settings“ (Einstellungen) antippen, und unter Robot Settings (Robotereinstellungen) die Option Remote Control (Fernsteuerung) auswählen.
- Den betreffenden Eingangsanschluss für die Fernsteuerung auswählen, der für die Funktion Power On (Stromversorgung Ein) oder Power Off (Stromversorgung Aus) verwendet werden soll.