
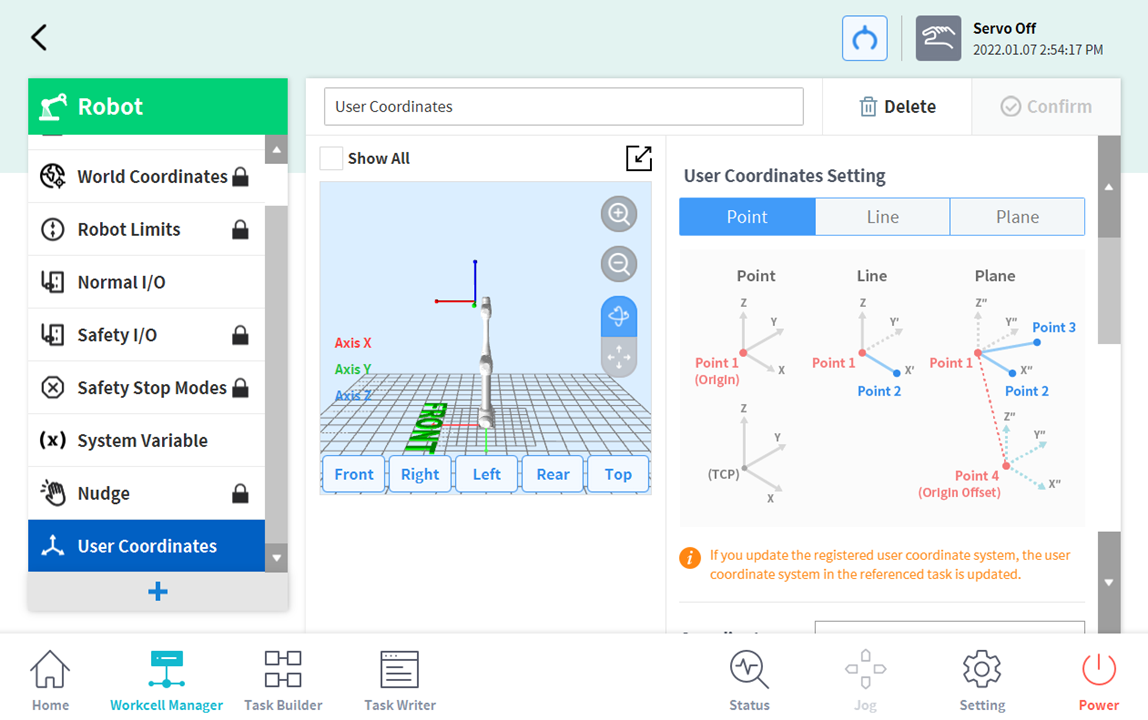
Einstellung der Benutzerkoordinaten
Es besteht die Möglichkeit, die Koordinaten für die Darstellung des Werkstücks festzulegen. Diese Koordinaten werden Benutzer-Koordinaten genannt. Sie unterscheiden sich von den global geltenden „World“-Koordinaten. Es ist möglich, die Stellung der Anwenderkoordinaten über Basiskoordinaten oder globale Koordinaten festzulegen. Die Anwenderkoordinaten können beim Einlernen und Bewegen des Roboters in „Task Builder“ (Aufgabenstruktur erstellen) und „Task Writer“ (Aufgabe schreiben) ausgewählt werden. Um die Benutzerkoordinaten festzulegen, die Schaltfläche
- Die Werte den Einstellungen entsprechend eingeben.
- Unbedingt die Abbildung in der Beschreibung und Warnhinweise zu den Anwenderkoordinaten lesen.
- Anwenderkoordinaten lassen sich auf der Grundlage von 1-Punkt, 2-Punkt und 3-Punkt erstellen.
- Es ist möglich, die Palettenkoordinaten aus den Erweiterten Optionen zu laden und an den Punkten der Anwenderkoordinaten anzuwenden.