
Bildschirm für realen Modus: Registerkarte „End Effector Information“ (Effektorinformationen)
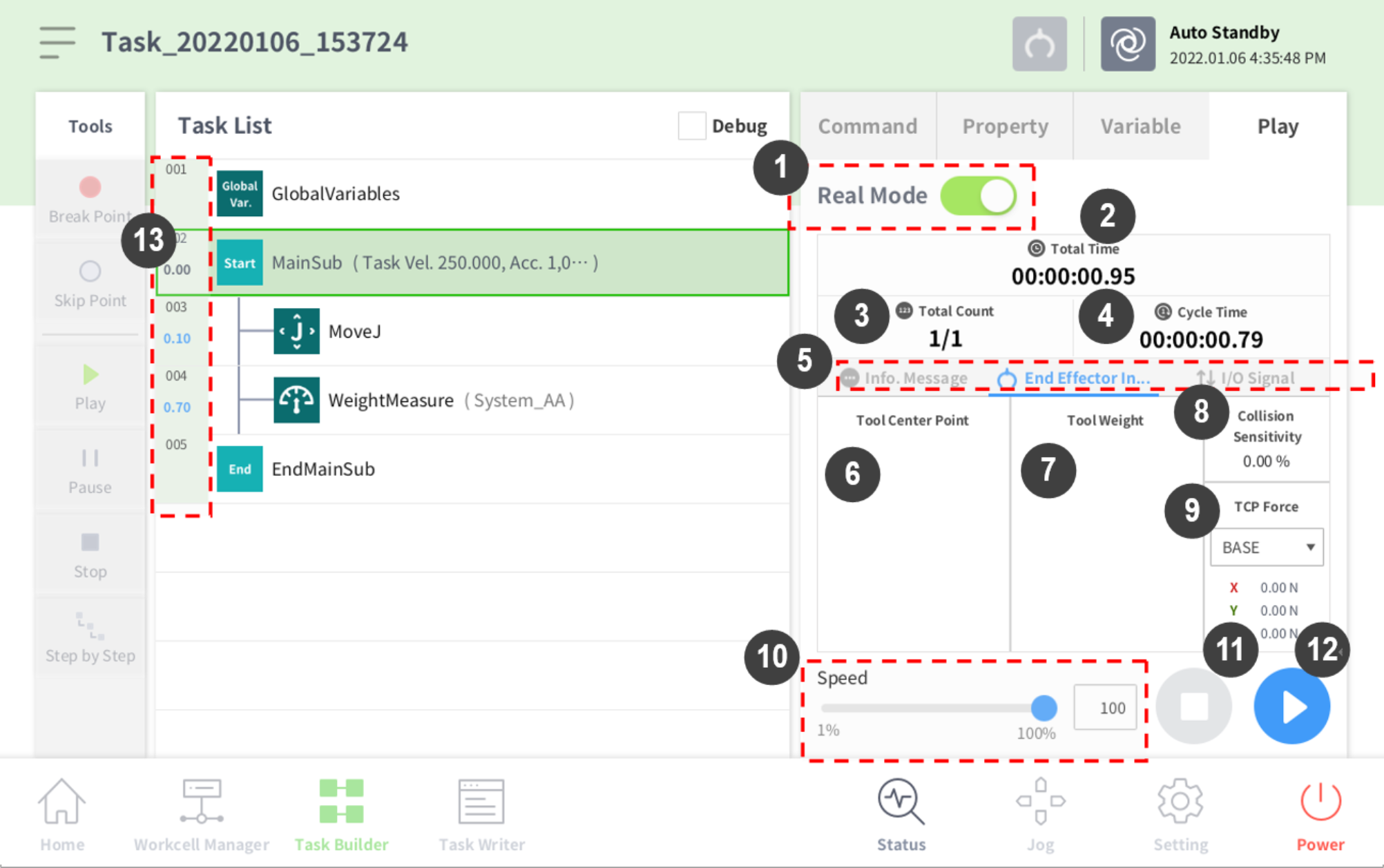
Der Bildschirm für Wiedergabe des realen Modus der Registerkarte für Endeffektor-Informationen im Task Builder (Aufgabenstruktur erstellen) ist wie folgt strukturiert:
Nr. | Element | Beschreibung |
|---|---|---|
1 | Real Mode ( | Legt den Wiedergabemodus des Robotertests fest.
|
2 | Total time | Zeigt die nach Aufgabenausführung insgesamt verstrichene Zeit an. |
3 | Total count | Zeigt die Gesamtzahl der ausgeführten Aufgaben an. |
4 | Average execution time | Zeigt die durchschnittlich benötigte Zeit für die Ausführung eines Zyklus einer Aufgabe in der Aufgabenliste an. |
5 | Information Screen Shift Tab | Sie können zwischen dem Roboter-Informationsnachricht, dem Endeffektor-Informationsbildschirm und dem Eingabe-/Ausgabe-Informationsbildschirm umschalten.
|
6 | Tool center point information area | Zeigt Informationen zum Werkzeugreferenzpunkt an, der mit den Konfigurationsfunktionen für Werkzeugreferenzpunkt und -gewicht des festgelegten TCP-Befehls oder durch Verfahren von Hand konfiguriert wurde. |
7 | Tool weight information | Zeigt Informationen zum Werkzeuggewicht an, das mit den Konfigurationsfunktionen für Werkzeugreferenzpunkt und -gewicht des festgelegten TCP-Befehls oder durch Verfahren von Hand konfiguriert wurde. |
8 | Collision information area | Zeigt den Wert der Kollisionsempfindlichkeit an, der für den Bereich festgelegt wurde, in dem sich der Roboter aktuell befindet. |
9 | Force information area | Zeigt Informationen zur Kraft im Basis-, World-, Benutzer- und Bezugskoordinatensystem an. Im Bezugskoordinatensystem wird die Kraft basierend auf den verwendeten Koordinatensystemangaben des Roboters angezeigt. |
10 | Speed slider | Steuert die Geschwindigkeit des Roboterbetriebs in der Betriebsart Real oder Virtuell. |
11 | Stop button | Stoppt die aktuelle Aufgabe. |
12 | Execute/pause toggle button | Führt die Aufgabe in der Aufgabenliste aus oder hält sie an. |
13 | Time | Zeigt die für die Ausführung des entsprechenden Befehls beanspruchte Zeit an. |

Achtung
- Vor Ausführung einer Aufgabe sollte die Aufgabe im virtuellen Modus ausgeführt werden, um festzustellen, ob die Aufgabe wie beabsichtigt funktioniert.
- Es wird empfohlen, das Roboterprogramm mit Angabe von temporären Wegpunkten zu testen, die außerhalb des Arbeitsraums anderer Maschinen liegen. Doosan Robotics ist nicht verantwortlich für Schäden, die durch Programmierfehler oder Fehlverhalten des Roboters auftreten, sowie für Beschädigungen anderer Einrichtungen.
Die Not-Aus-Taste befindet sich am Bedientableau. Drücken Sie in einer Notsituation die Not-Aus-Taste, um den Roboter zu stoppen.
Im Falle von Modellen ohne Kraftdrehmomentsensor werden die Kraftwerte (X, Y, Z) nicht überwacht.