
Befestigung des Roboters
Den Roboter mit Schrauben M8 in den vier Bohrungen 9,5 mm am Handhabungsautomatfußes befestigen.
- Zum Festziehen der Schrauben wird ein Anzugsdrehmoment von 20 Nm angeraten.
Unterlegscheiben (federnd-flach) verhindern ein Lösen durch Vibration. - Mit Zapfen Φ5 zur Standortmarkierung den Handhabungsautomat exakt an einem festen Standort installieren.
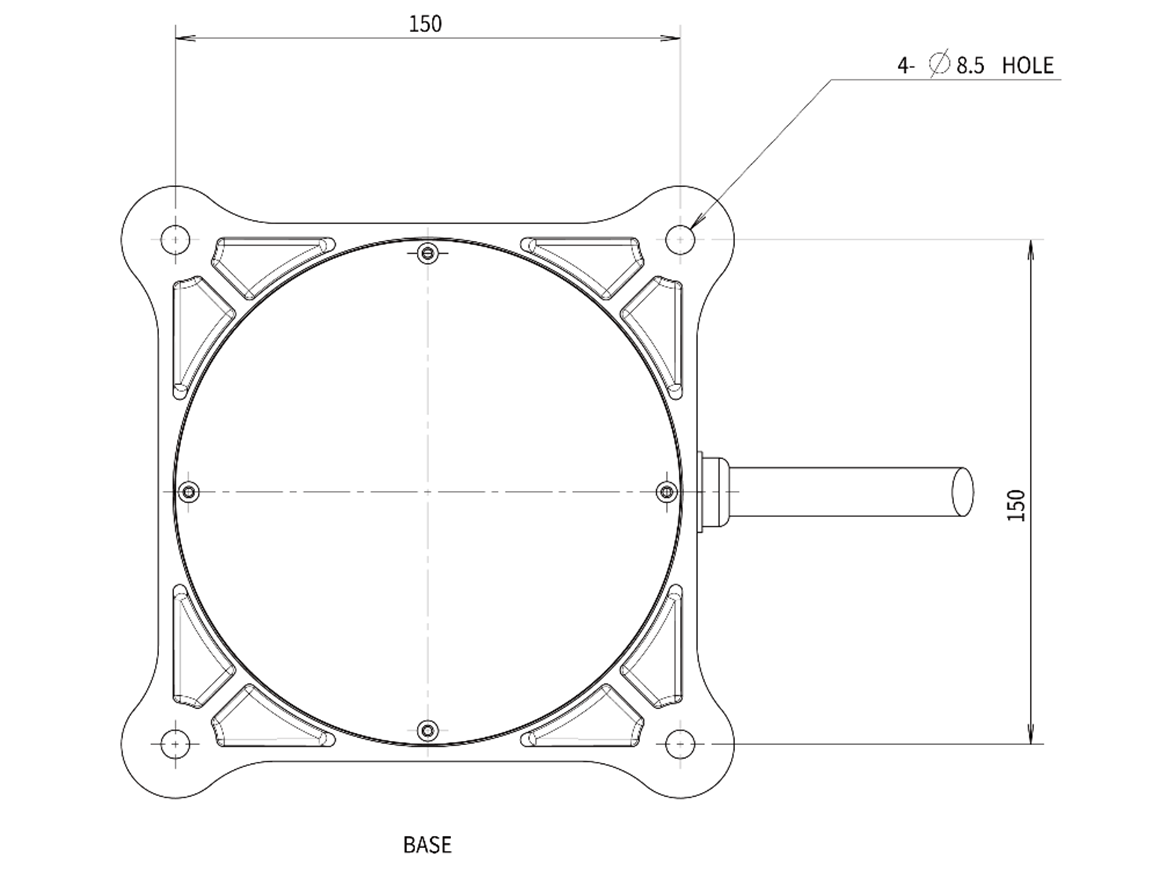
Technische Zeichnung des Handhabungsautomatfußes, vier Schrauben M8 verwenden. Einheit [mm]
Warnung
- Die Schrauben vollständig festziehen, um eine Lockerung während des Betriebs des Handhabungsautomaten zu verhindern.
- Den Fuß des Handhabungsautomaten auf einer stabilen Oberfläche installieren, die den während des Betriebs erzeugten Lasten standhält (10 Mal das maximale Drehmoment und 5 Mal das Gewicht des Roboters).
- Der Roboter interpretiert Vibrationen des Handhabungsautomatfußes als Kollision und aktiviert den Not-Aus. Deshalb darf bei Installation an Orten, die automatisch ihre Position verändern, der Fuß nicht an einem Ort installiert werden, der bei Bewegung eine hohe Beschleunigung aufweist.
- Den Handhabungsautomaten mit den entsprechenden Verfahren an einem festgelegten Standort montieren. Die Befestigungsfläche muss fest sein, d. h. sie darf nicht nachgeben.
- Bei Kontakt mit Wasser über einen längeren Zeitraum wird der Handhabungsautomat beschädigt. Deshalb darf er nicht in einer Umgebung mit hoher Feuchtigkeit oder unter Wasser betrieben werden.