
Ausführung basierend auf World-Koordinaten
Um den Roboter basierend auf World-Koordinaten zu bewegen, wie folgt vorgehen:
- Registerkarte Task (Aufgabe) im Bildschirm Jog (Verfahren) auswählen.
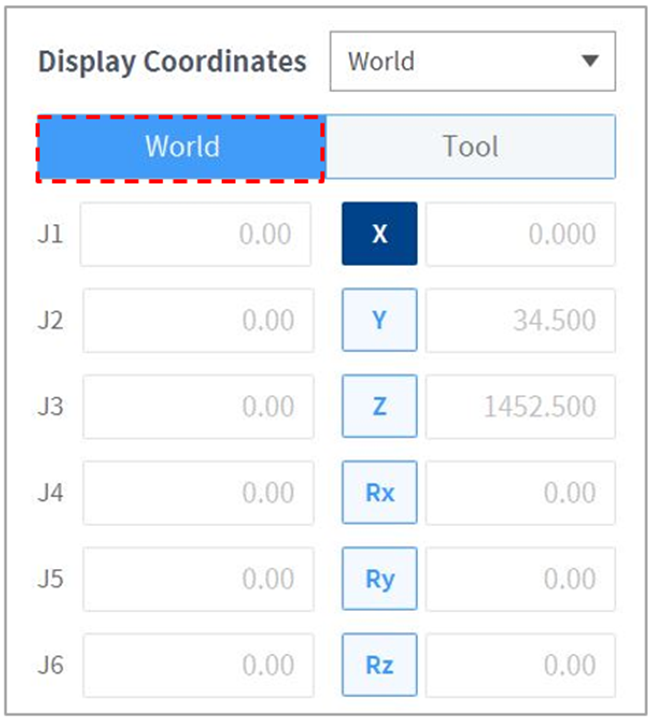
- Die Anzeigekoordinaten auswählen, die als World-Koordinaten verwendet werden sollen, und World als Bezugspunkt für die Aufgabenkoordinaten auswählen.
- Die World-Koordinaten für die Bewegung auswählen.
- Die Richtungstaste (

