
Ausführung auf der Grundlage eines Gelenks
Um den Winkel basierend auf dem Robotergelenk zu bewegen ist, wie folgt vorgehen:
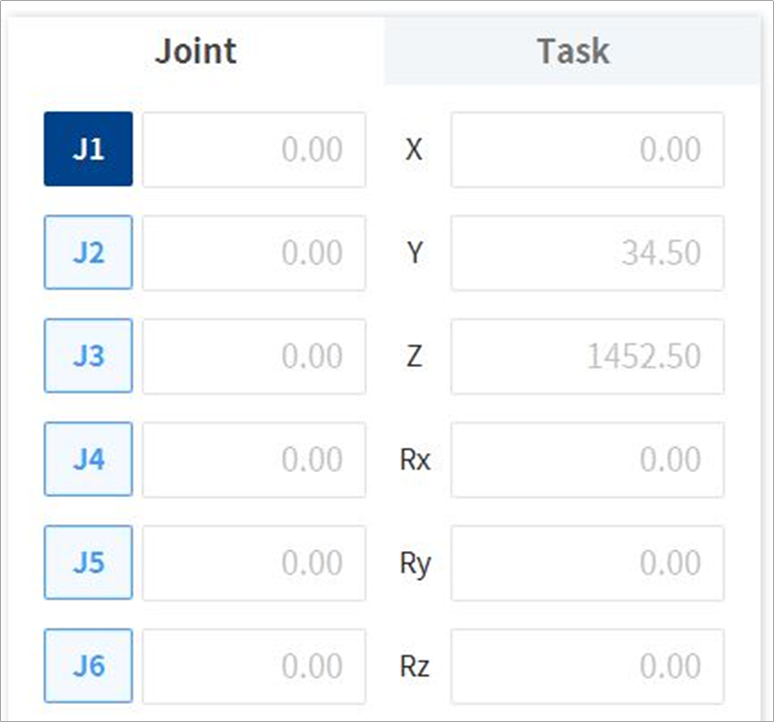
- Registerkarte Joint (Gelenk) im Bildschirm Joint (Gelenk) auswählen.
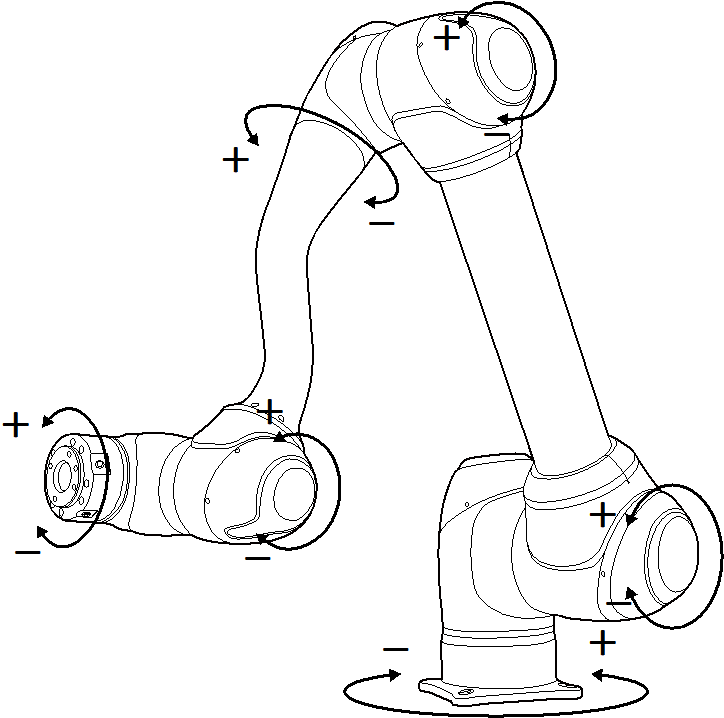
- Zum Anpassen des Winkels die Achse (J1-J6) auswählen.
- Die Richtungstaste (


Hinweis
Im virtuellen Modus findet die Sicherheitszone keine Anwendung.