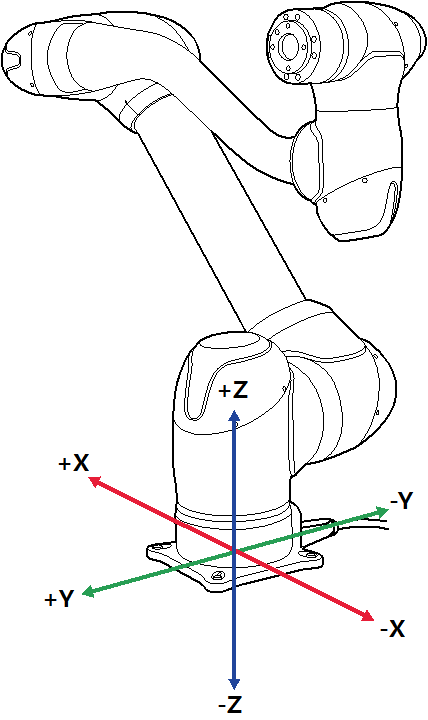
Um den Roboter basierend auf dem Roboterfuß zu bewegen, wie folgt vorgehen:
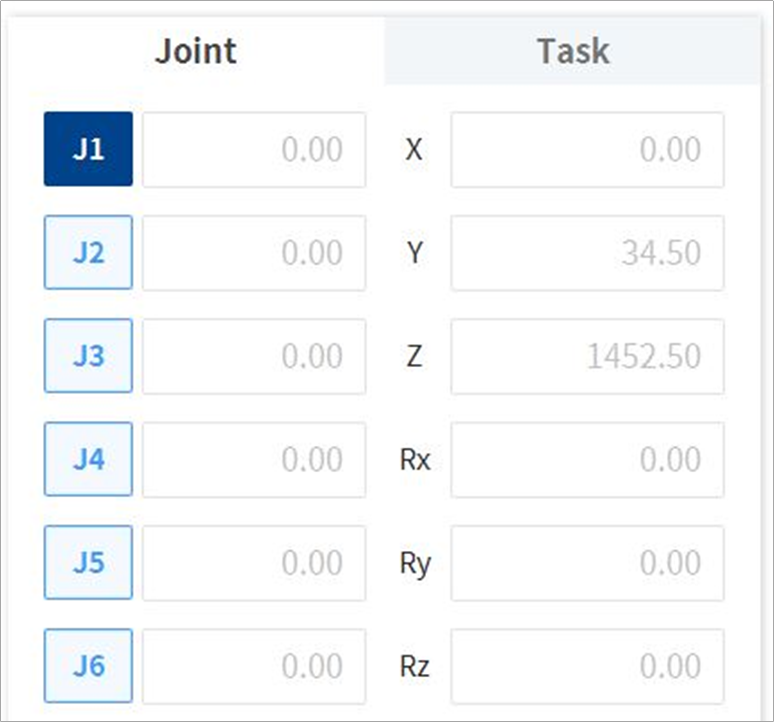
Registerkarte Task (Aufgabe) im Bildschirm Jog (Verfahren) auswählen.
Die Anzeigekoordinaten auswählen, die als Basiskoordinaten verwendet werden sollen, und Base (Basis) als Bezugspunkt für die Aufgabenkoordinaten auswählen.
Die Basiskoordinaten für die Bewegung auswählen.
Die Richtungstaste (,) gedrückt halten, um die entsprechende Achse zu bewegen.
Hinweis
Im virtuellen Modus findet die Sicherheitszone keine Anwendung.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.