Allgemeine Informationen zu den Grundprinzipien von Fertigkeitsbefehlen
Fertigkeitsbefehle basieren auf einigen wenigen Vorgangsmustern.
Damit ein Roboter einen Vorgang beginnen kann, müssen Gewicht und Werkzeugreferenzpunkt (TCP) des am Roboter installierten Werkzeugs konfiguriert werden. Das grundlegende Vorgangsmuster für Fertigkeitsbefehle muss eine Anfahrstellung und eine Abfahrstellung senkrecht zur Referenzstellung aufweisen.
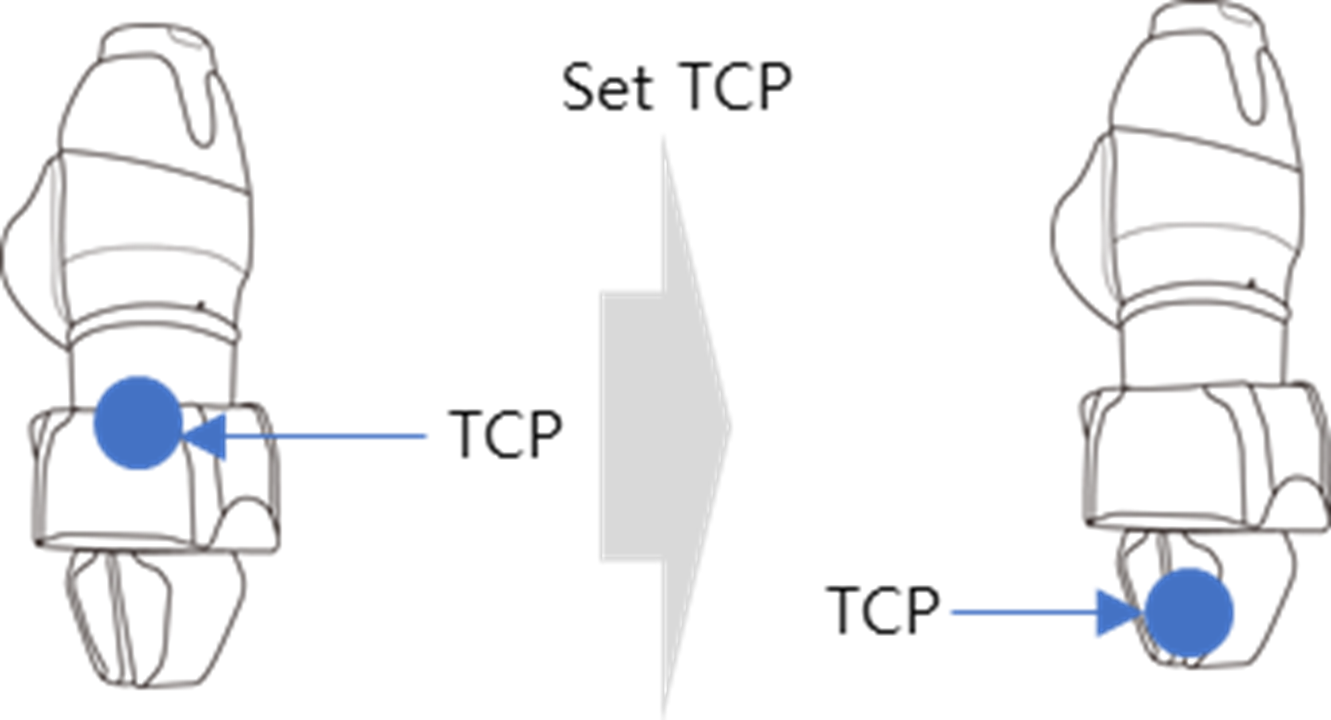
TCP Setting (TCP-Einstellung): Bei Verwendung eines Fertigkeitsbefehls für einen Effektor wird automatisch die TCP-Versatzeinstellung geändert. Die Ausführungsphase des Fertigkeitsbefehls für einen Effektor umfasst eine geeignete Versatzeinstellung für den TCP des Effektors. Wenn sich der TCP-Versatz ändert, kann die Übergangsbewegungsfunktion, die für einen glatten Übergang vom vorherigen Bewegungsbefehl sorgt, nicht verwendet werden.
.
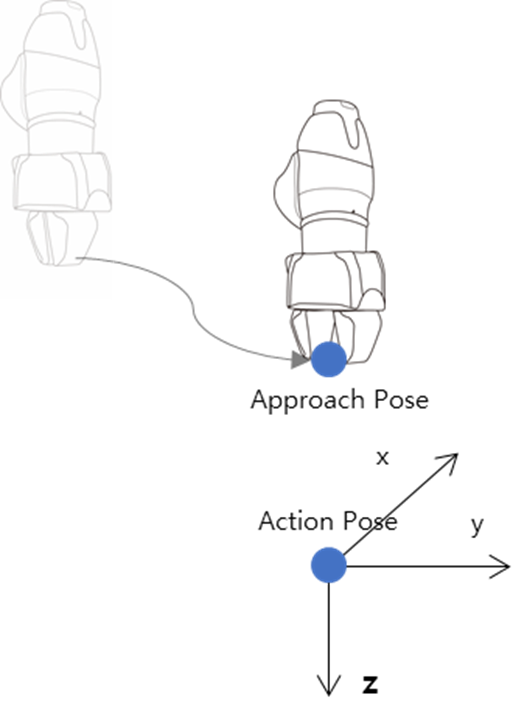
Move to Approach Pose (Bewegung zur Anfahrstellung): Für die Bewegung zur Anfahrstellung gibt es einen entsprechenden Punkt. Dieser wird ausgehend von der Anfahrstellung in der negativen Z-Richtung festgelegt. Es ist aber auch möglich, eine andere Richtung auszuwählen. Der eingegebene Annäherungsabstand für die Aktionsstellung wird automatisch berechnet und es erfolgt eine Bewegung zum entsprechenden Punkt.
Move To Reference Pose (In Referenzstellung bewegen): Hierbei handelt es sich um den Punkt am Werkstück, an dem der Effektor seine Arbeit durchführt. Um andere Detailkoordinaten als 
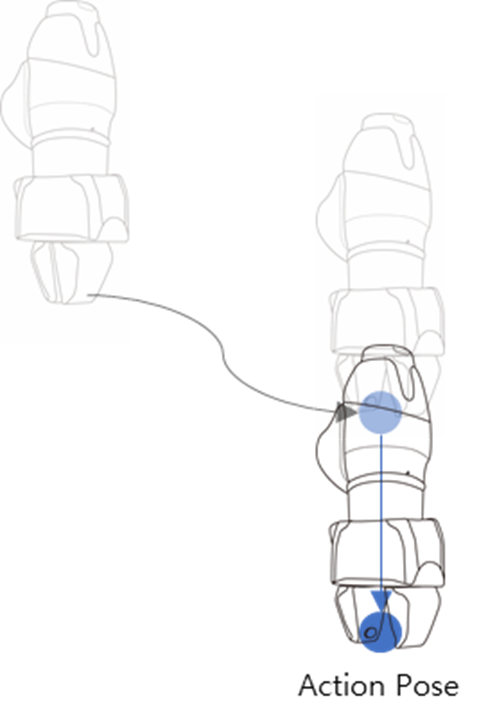
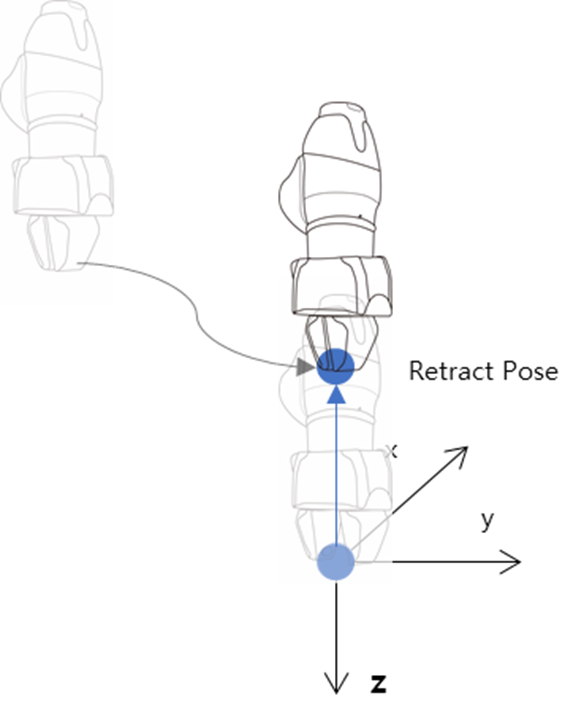
Move to Retract Pose (Bewegung zur Abfahrstellung): Dies ist der Punkt, an dem das Werkstück erfasst und sicher an einen anderen Punkt bewegt wird. Dieser befindet sich in negativer Z-Richtung von der Anfahrstellung. Es ist aber auch möglich, eine andere Richtung auszuwählen. Der eingegebene Rückzugsabstand für die Aktionsstellung wird automatisch berechnet und es erfolgt eine Bewegung zum entsprechenden Punkt.
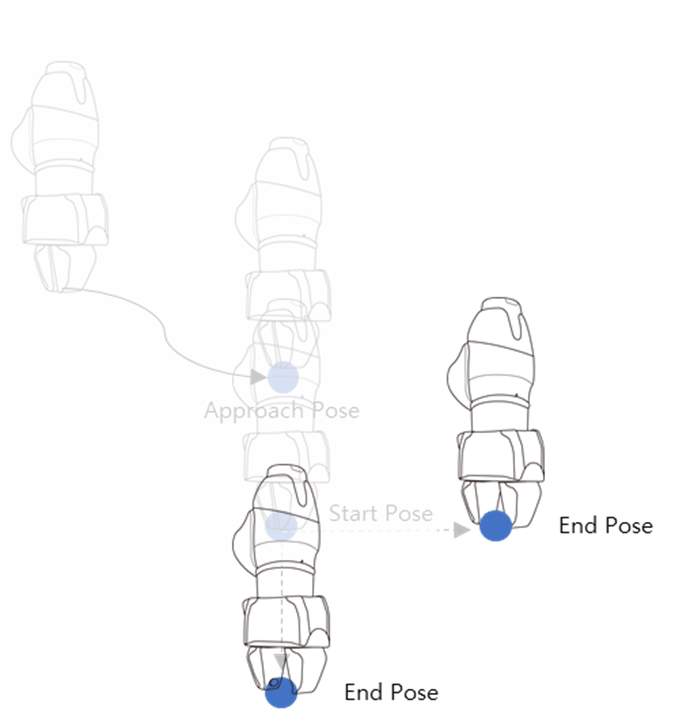
Move to Start Pose (Bewegung zur Startstellung): Wenn das Effektorausführungsziel nicht mit einer einzelnen Bewegung endet, kann es einen Zwischenpunkt und einen Endpunkt geben. Die Aktionsstartstellung ist der Punkt, an dem die Arbeit beginnt (Fertigkeit „Door_OpenClose“ – Startstellung).
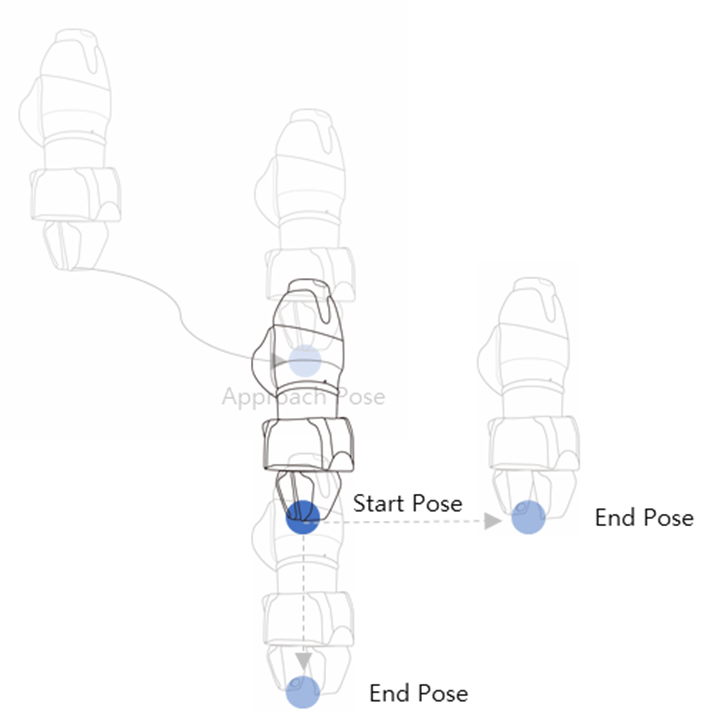
Move to End Pose (Bewegung zur Endstellung): Wenn das Effektorausführungsziel nicht mit einer einzelnen Bewegung endet, kann es einen Zwischenpunkt und einen Endpunkt geben. Die Aktionsendstellung ist der Punkt, an dem die Arbeit endet (Fertigkeit „Door_OpenClose“ – Endstellung).