
Robot Limits Setting (Robotergrenzwerteinstellungen)
Hiermit werden die Sicherheitsgrenzwerte von Sicherheitsüberwachungsfunktionen festgelegt.
Hinweis
- Die Grenzwerteinstellungen und anfänglichen Sicherheitseinstellungen können von der jeweiligen Roboterauslegung abhängen.
- Der Sicherheitsgrenzwert ist der Wert, bei dem die Sicherheitsüberwachungsfunktion die Stoppfunktion auslöst. Nachdem der Stoppvorgang durchgeführt wurde, können Position des Roboters und wirkende äußere Kraft vom konfigurierten Sicherheitsschwellenwert abweichen.
TCP/Robot Limits (Grenzwerte TCP/Roboter)
Um die TCP/Robotergrenzwerte festzulegen, zum Installationsbereich Robot (Roboter) wechseln und Robot > Robot Limits (Robotergrenzwerte) > TCP/Robot (TCP/Roboter) auswählen. Das Layout des Einstellungsbildschirms für TCP-/Robotergrenzwerte umfasst folgende Elemente:
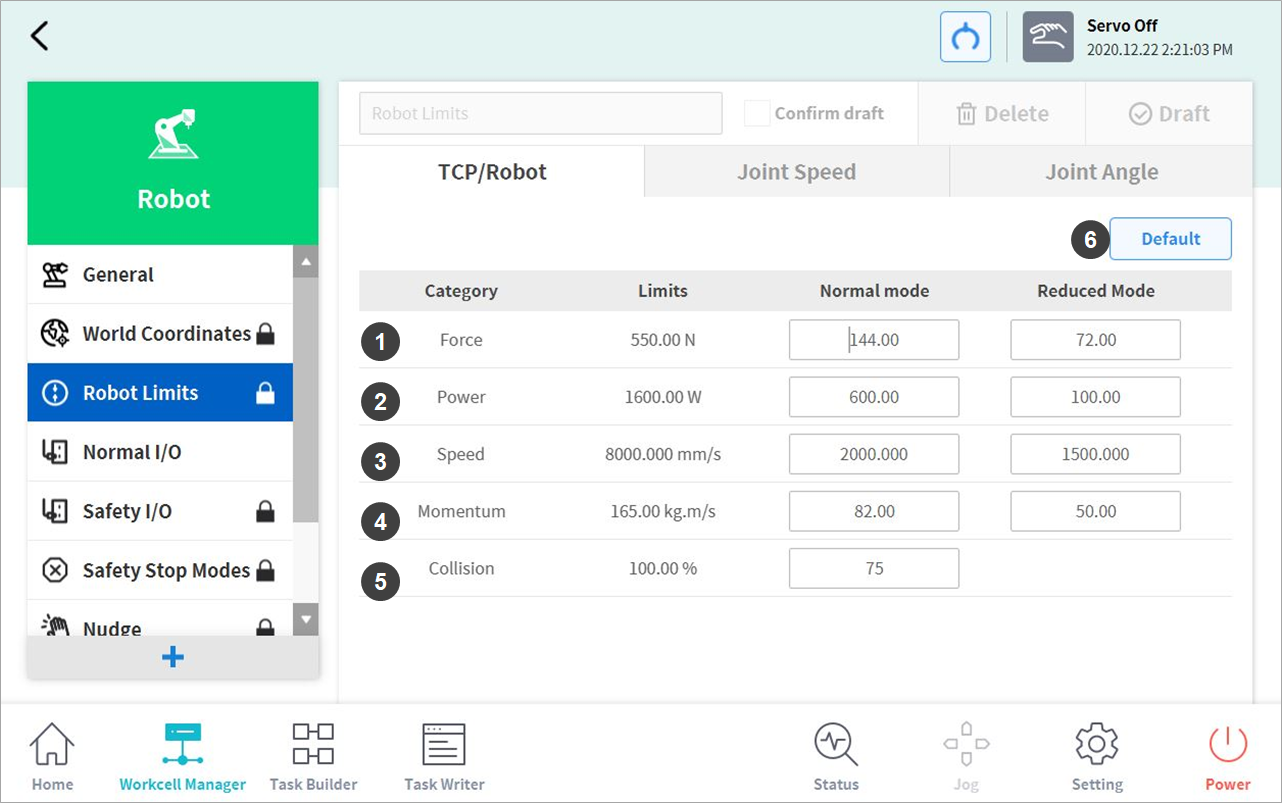
Nr. | Element | Beschreibung |
1 | Force (N) | Hiermit kann die auf den Werkzeugreferenzpunkt (TCP) angewendete Kraft begrenzt werden. |
2 | Power (W) | Hiermit kann die mechanische Leistung des Roboters begrenzt werden. |
3 | Speed (mm/s) | Hiermit kann die Geschwindigkeit des Werkzeugreferenzpunkts (TCP) begrenzt werden. |
4 | Momentum (kg.m/s) | Hiermit kann das Kraftmoment des Roboters begrenzt werden. |
5 | Collision (%) | Hiermit wird die Empfindlichkeit der Kollisionserkennung konfiguriert. |
6 | Default Value | Hiermit werden die Einstellungen für die TCP-/Robotergrenzwerte auf die Standardwerte zurückgesetzt. |
Joint Speed Limits (Gelenk-Geschwindigkeitsgrenzwerte)
Um die Gelenk-Geschwindigkeitsgrenzwerte festzulegen, zum Installationsbereich Robot (Roboter) wechseln und Robot > Robot Limits (Robotergrenzwerte) > Joint Speed (Gelenkgeschwindigkeit) auswählen. Das Layout des Einstellungsbildschirms für Gelenk-Geschwindigkeitsgrenzwerte umfasst folgende Elemente:
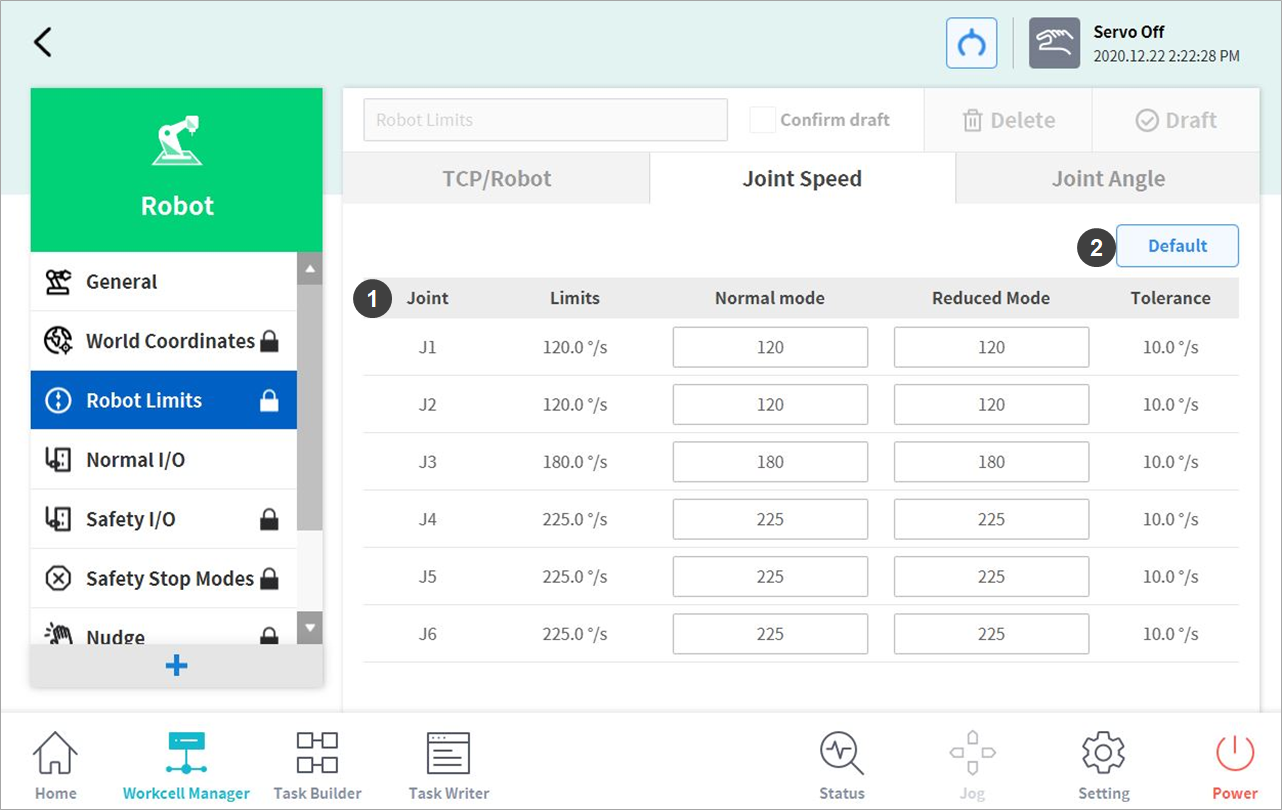
Nr. | Element | Beschreibung |
1 | Joint Speed | Hier kann die Geschwindigkeit für jedes Gelenk begrenzt werden. |
2 | Default Value | Hiermit werden die Einstellungen für die Gelenk-Geschwindigkeitsgrenzwerte auf die Standardwerte zurückgesetzt. |
Joint Angle Limits (Gelenk-Winkelgrenzwerte)
Um die Gelenkwinkelgrenzwerte festzulegen, zum Installationsbereich Robot (Roboter) wechseln und Robot > Robot Limits (Robotergrenzwerte) > Joint Angle (Gelenkwinkel) auswählen. Das Layout des Einstellungsbildschirms für Gelenkwinkelgrenzwerte umfasst folgende Elemente:
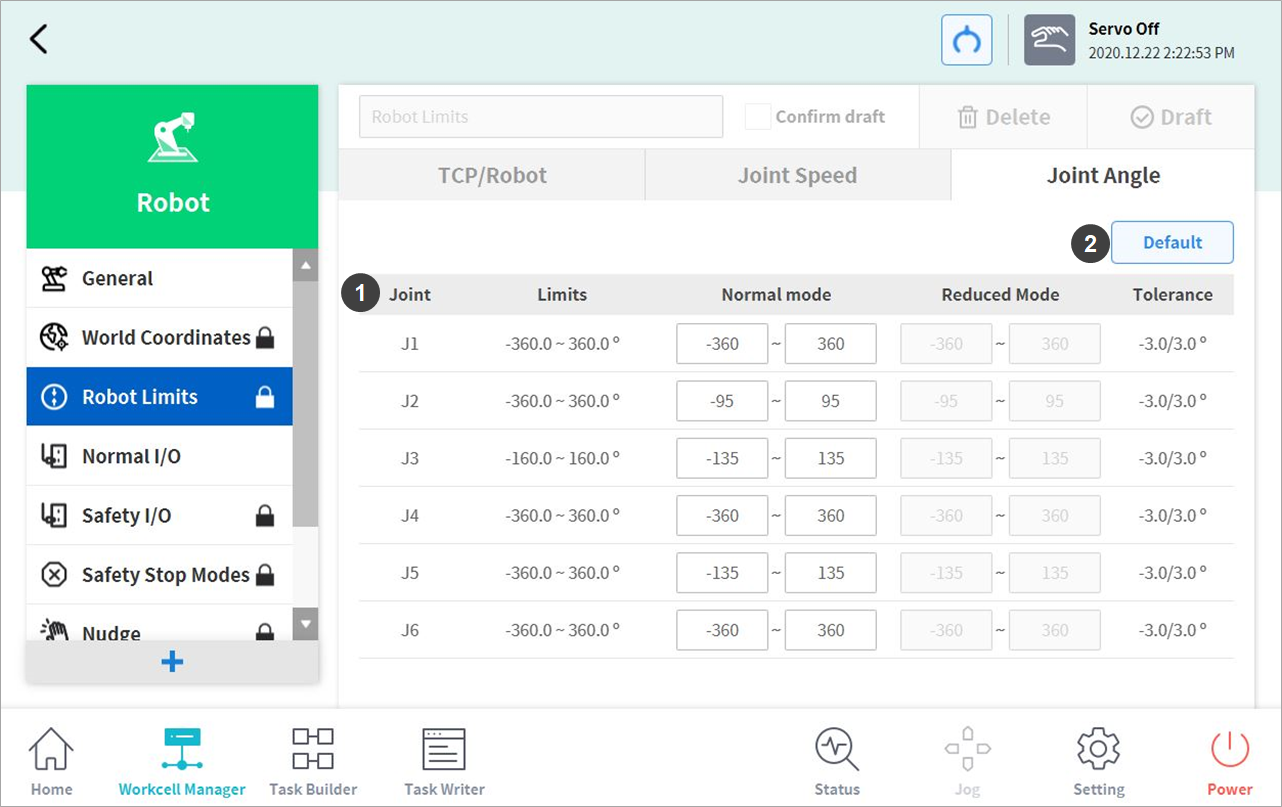
Nr. | Element | Beschreibung |
1 | Angle Range of each Joint | Hier kann der Winkelbereich für jedes Gelenk begrenzt werden. |
2 | Default Value | Hiermit werden die Einstellungen für die Gelenkwinkelgrenzwerte auf die Standardwerte zurückgesetzt. |