
Einstellungen für räumliche Begrenzung
Um die räumlichen Begrenzungen des Roboters zu konfigurieren, die Schaltfläche „Hinzufügen“ im Installationsbereich Robot (Roboter) antippen und Space Limit > Cube, Cylinder, Multi-plane Box, Sphere bzw Tilted Cuboid (Räumliche Begrenzung > Quader, Zylinder, Mehrebenen-Kasten, Kugel bzw. Geneigter Quader) auswählen. Das Sicherheitskennwort wird bei der Einrichtung und Aktivierung benötigt.
- Den Namen der Installation in das Feld „Workcell Name“ (Installationsname) oben im Bildschirm „Workcell Setting“ (Installationseinstellung) eingeben.
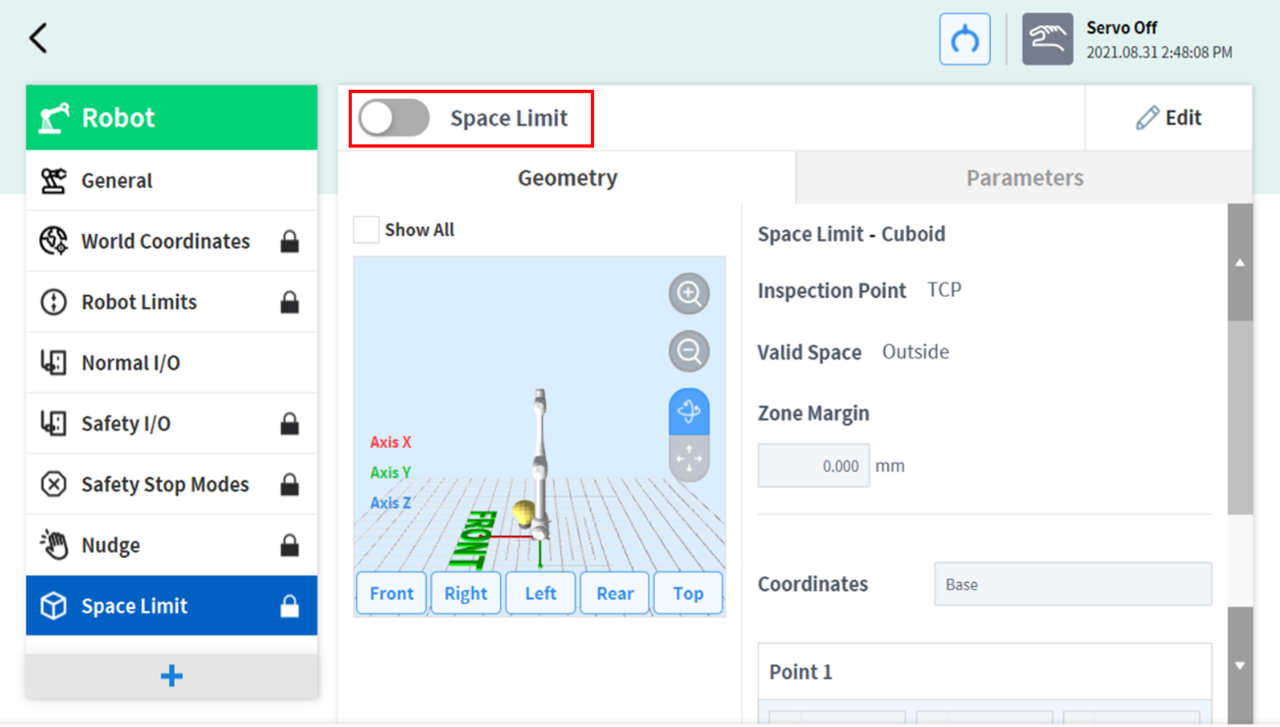
- Die Stellungsinformationen abhängig von der Form der räumlichen Begrenzung zusammen mit Prüfpunkt, dem zulässigen Raum und Zonenspielraum auf der Registerkarte für die Geometrie festlegen.
- Aktivierung des dynamischen Bereichs und erweitere Optionen auf der Registerkarte für Parameter festlegen und mit Draft (Entwurf) drücken.
- Überprüfen Sie, ob alle angezeigten Parameter die gewünschten Werte aufweisen, Confirm draft (Entwurf bestätigen) auswählen und Confirm (Bestätigen) drücken.
- Die Aktivierungsumschaltfläche drücken, um die räumliche Begrenzung zu übernehmen.
Hinweis
Abhängig von den Einstellungsmethoden bestehen Vorgaben für den Zonenspielraum.
- Wenn die Werkzeugform feststeht und die Prüfung des Körpervolumens nicht ausgewählt ist, beträgt der Spielraum zum Werkzeugreferenzpunkt (TCP) 0 mm.
- Wenn die Werkzeugform feststeht und die Prüfung des Körpervolumens ausgewählt ist, beträgt der Spielraum zum Werkzeugreferenzpunkt (TCP) 0 mm.
- Wenn die Werkzeugform nicht feststeht und die Prüfung des Körpervolumens nicht ausgewählt ist, beträgt der Spielraum zum Werkzeugreferenzpunkt (TCP) 0 mm.
- Wenn die Werkzeugform nicht feststeht und die Prüfung des Körpervolumens ausgewählt ist, beträgt der Spielraum zum Werkzeugreferenzpunkt (TCP) 60 mm.