Einstellungen für die Zone mit reduzierter Kollisionsempfindlichkeit
Um die Zone mit reduzierter Kollisionsempfindlichkeit festzulegen, die Schaltfläche 
- Den Namen der Installation in das Feld „Workcell Name“ (Installationsname) oben im Bildschirm „Workcell Setting“ (Installationseinstellung) eingeben.
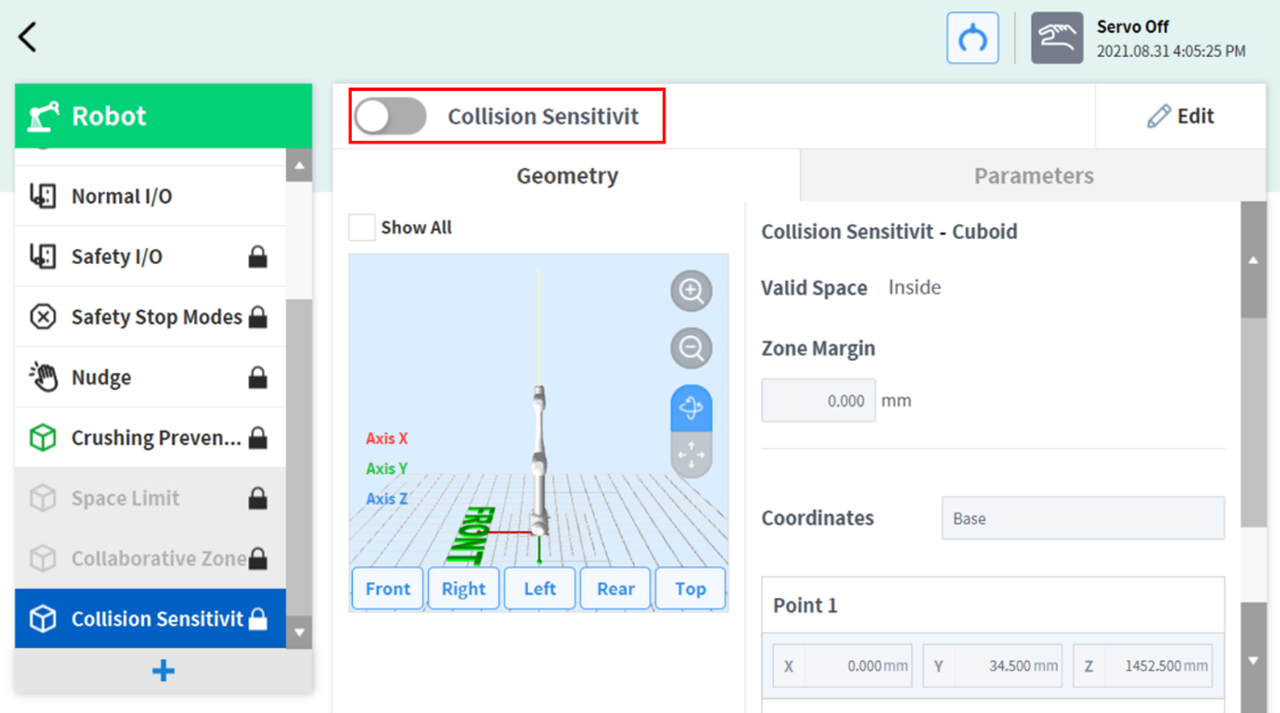
- Die Stellungsinformationen abhängig von der Zonenform zusammen mit dem zulässigen Raum und Zonenspielraum auf der Registerkarte für die Geometrie festlegen.
Override Option (Übersteuerungsoption), TCP/Robot Limits (Grenzwerte TCP/Roboter) und Dynamic Zone Enable (Dynamische Zonenaktivierung) auf der Registerkarte für Parameter festlegen und Draft (Entwurf) drücken.
Warnung
- Die Zone mit reduzierter Kollisionsempfindlichkeit ist eine Zone mit hoher Priorität.
- Zonen mit hoher Priorität haben Vorrang vor anderen Zonen und der globalen Einstellung für Robotergrenzwerte. Wenn sich mehrere Zonen mit hoher Priorität überlappen, verwendet die Sicherheitsfunktion den Sicherheitsgrenzwert mit der GERINGSTEN Einschränkung. Aus diesen Gründen sollte die Größe von Zonen mit hoher Priorität sicherheitshalber so klein wie möglich angegeben werden.
- Überprüfen Sie, ob alle angezeigten Parameter die gewünschten Werte aufweisen, Confirm draft (Entwurf bestätigen) auswählen und Confirm (Bestätigen) drücken.
- Die Aktivierungsumschaltfläche drücken, um die Zone mit reduzierter Kollisionsempfindlichkeit zu übernehmen.