
Wegpunkteinstellung
Zum Konfigurieren des Wegpunkts eines Befehls wie folgt vorgehen:
- Typ (Absolute (Absolut), Relative (Relativ)) der Bezugskoordinate und des Koordinatenwerts auswählen.
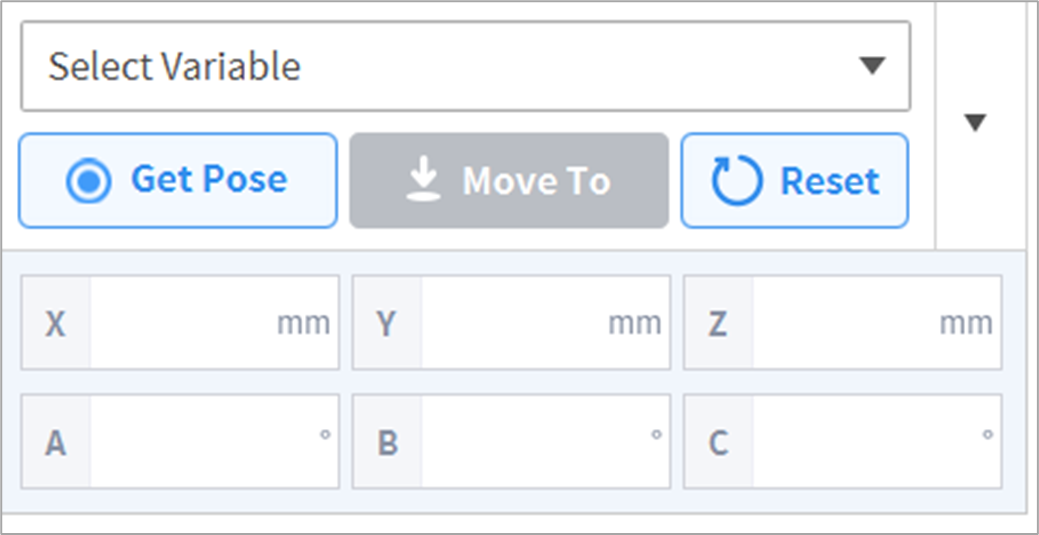
- Roboter mit der Verfahrfunktion oder durch direktes Einlernen an die gewünschte Position bewegen.
- Schaltfläche Save Pose (Stellung speichern) antippen, um die Roboterwerkzeugposition zu speichern.
- Bei Bedarf mit GlobalVariables oder dem Befehl „Define“ (Definieren) eine Variable definieren.
- Bei Bedarf mit GlobalVariables oder dem Befehl „Define“ (Definieren) eine Variable definieren.
Hinweis
- Die Projektionspose wandelt die eingegebenen Koordinatenwerte in Koordinatenwerte um, die von einem Roboter mit 5 Freiheitsgraden bewegt werden können.
- Die Schaltfläche „Projektionspose“ wird nur von Modellen der P-Serie unterstützt.