
Einstellung für Bewegung mit Winkel
Verfahrensweise zum Bewegen des Roboters mit einem bestimmten Winkel:
- Registerkarte Move (Bewegen) und dann die Registerkarte Joint (Gelenk) auswählen.
- Zielwert für Winkel des Robotergelenks eingeben. (J4 ist bei Modellen der P-Serie deaktiviert)
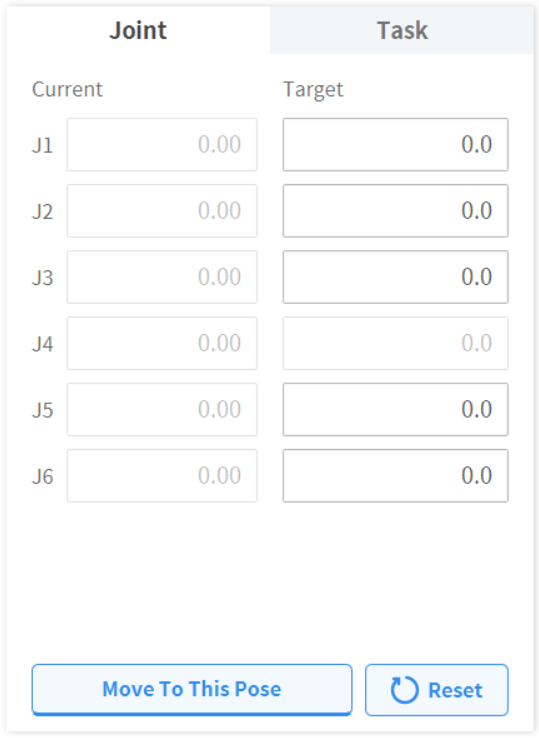
- Realen Modus freischalten

- Schaltfläche Move to Corresponding Pose (Bewegung zur entsprechenden Stellung) antippen und halten, um den Roboter zum festgelegten Gelenkwinkel zu bewegen.