
Bezeichnungen und Funktionen
Handhabungsautomat
Bauteilbezeichnungen
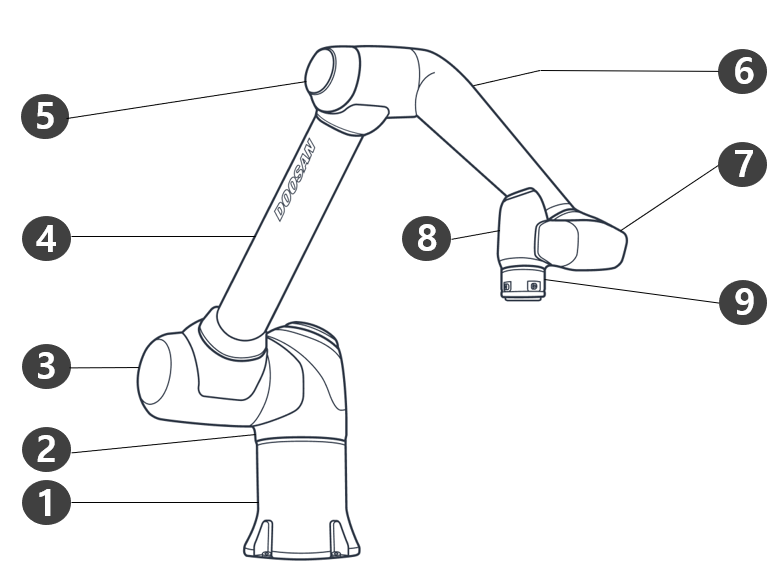
Nr. | Beschreibung | Nr. | Beschreibung |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool flange |
5 | J3 | 10 |
Wichtige Funktionsmerkmale
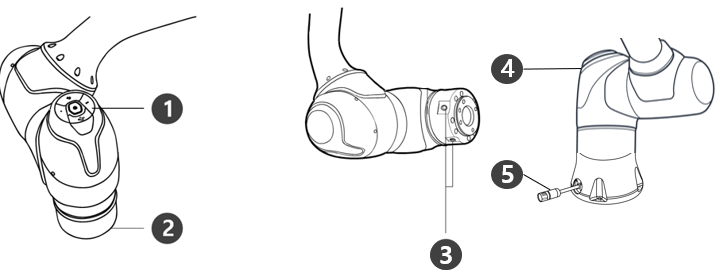
| Nr. | Bauteil | Beschreibung |
|---|---|---|
1 | Cockpit | [Option] Steuergerät für direktes Einlernen und Betrieb. |
2 | Tool flange | Bereich für Werkzeugmontage. |
| 3 | Flange I/O | Der Eingangs-/Ausgangsanschluss für die Werkzeugsteuerung. (Digitaleingang 3-Kanal, Ausgang 3-Kanal) |
4 | Flange LED | Zeigt den Roboterzustand in verschiedenen Farben an. Weitere Informationen zum Roboterzustand finden Sie unter Status- und Flansch-LED-Farbe für die einzelnen Modi. |
5 | Connector | Dient der Stromversorgung an und Kommunikation mit dem Roboter. |
Steuergerät
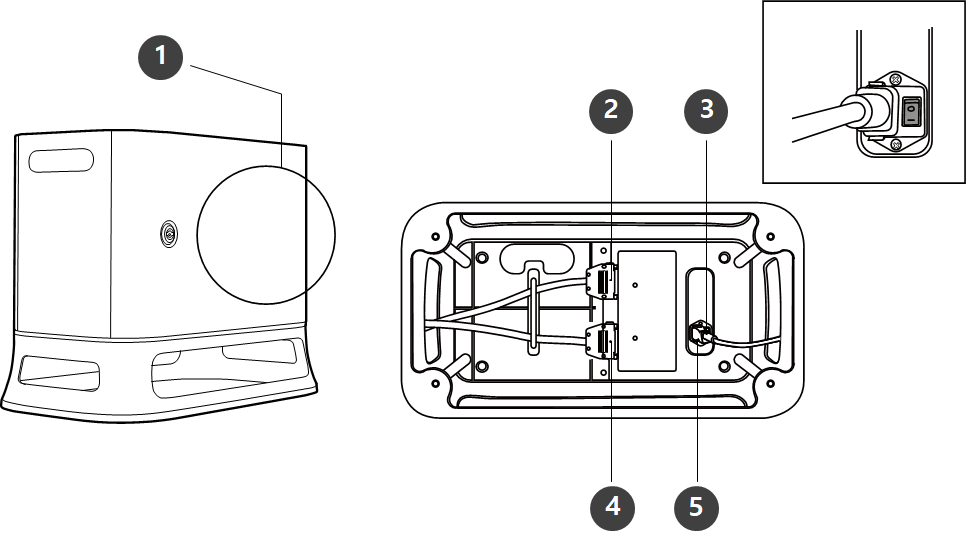
Nr. | Bauteil | Beschreibung |
|---|---|---|
1 | I/O connection terminal (internal) | Zum Anschließen des steuergerät oder Peripheriegeräten |
2 | Teach pendant cable connection terminal | Zum Verbinden des Kabels des Bedientableaus mit dem steuergerät |
3 | Power switch | Zum Ein-/Ausschalten der Hauptstromversorgung des steuergeräts |
4 | Kabelanschlussklemme für Handhabungsautomat | Zum Anschließen des Handhabungsautomatkabels an den steuergerät |
5 | Power connection terminal | Zum Anschließen der Stromversorgung des steuergeräts |
Hinweis
- Bei Auswahl eines optionalen Steuergeräts sind die Anweisungen zur Kabelverbindung im Anhang zu beachten.