
Einstellungen für „Nudge“ (Stupsen)
Wird der Roboter durch einen Sicherheitsstoppmodus SS2 oder RS1 in einer kollaborativen Zone gestoppt, kann der Zustand „Interrupted“ (Unterbrochen) zurückgesetzt und die Aufgabe durch Anwendung einer äußeren Kraft („Nudge“, Stupseingabe) fortgesetzt werden. Die Option zum Stupsen lässt sich an anwenderdefinierten Abschnitten freischalten.
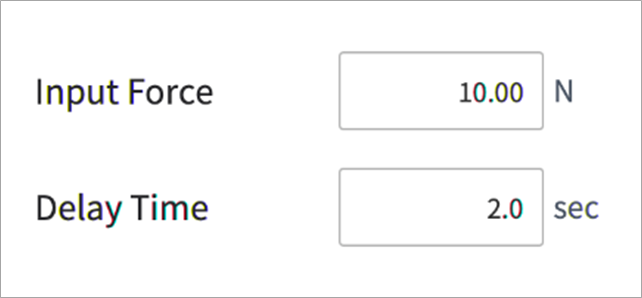
Zum Einstellen von Stupsen die Funktion Nudge innerhalb des Installationsbereichs Robot (Roboter) auswählen. Bezüglich einer weiteren Stupseingabe können die zu erkennende Krafteinwirkung (Stupskraft) und die Standbyzeit (Verzögerungszeit) vom Zeitpunkt der Stupserkennnung bis zur Fortsetzung der Arbeit zusätzlich eingegeben werden.
Der konfigurierbare Bereich der Eingangskraft für Nudge liegt zwischen 10,00 und 50,00 N für die M-Serie und 15,00 bis 50,00 N für die H-Serie (P-Serie).
Warnung
Die Stupsfunktion darf nur verwendet werden, wenn dies durch eine umfassende Gefahrenanalyse genehmigt wurde.
A/E-Serie, die nicht über den Gelenkdrehmomentsensor verfügt, verfügt ebenfalls in den Erweiterten Optionen nicht über die Einstellungen für Nudge (Stupsen)