
Stellung und Bedingung für Messungen
Die Messungen für Gelenk 1 werden bei senkrecht zum Boden verlaufender Drehachse und horizontaler Bewegung durchgeführt.
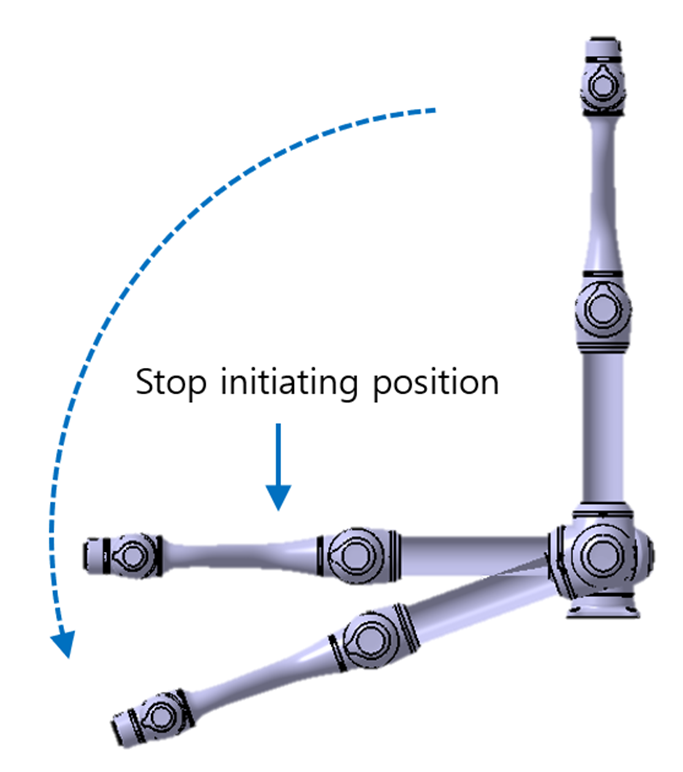
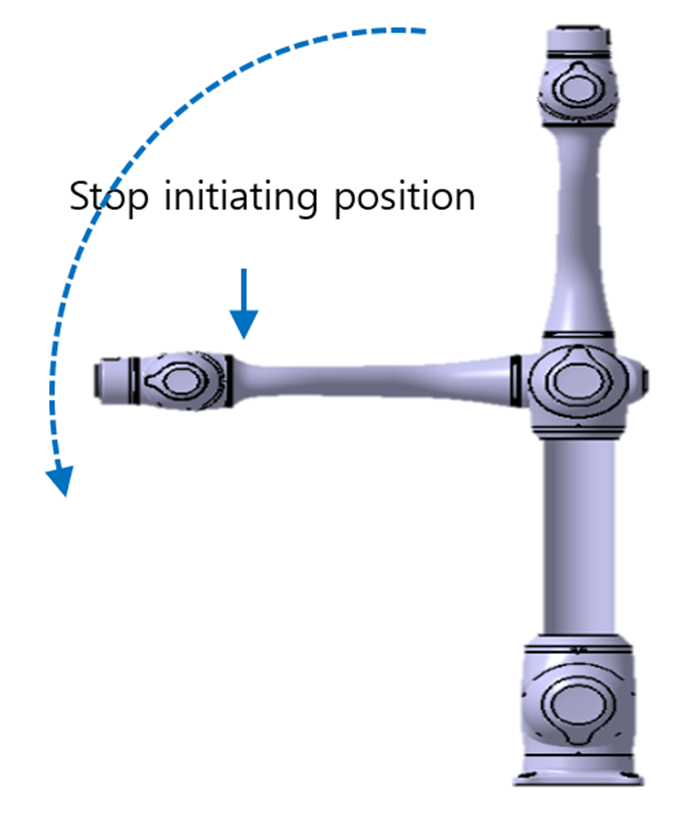
Die Messungen für Gelenk 2 und Gelenk 3 werden bei parallel zum Boden verlaufender Drehachse durchgeführt, wenn der Roboter in einer Abwärtsbewegung senkrecht zum Boden gestoppt wird.
Hinweis
Die Messergebnisse gelten für den ungünstigsten Fall. Die Messungen können abhängig von den jeweiligen Umständen schwanken.
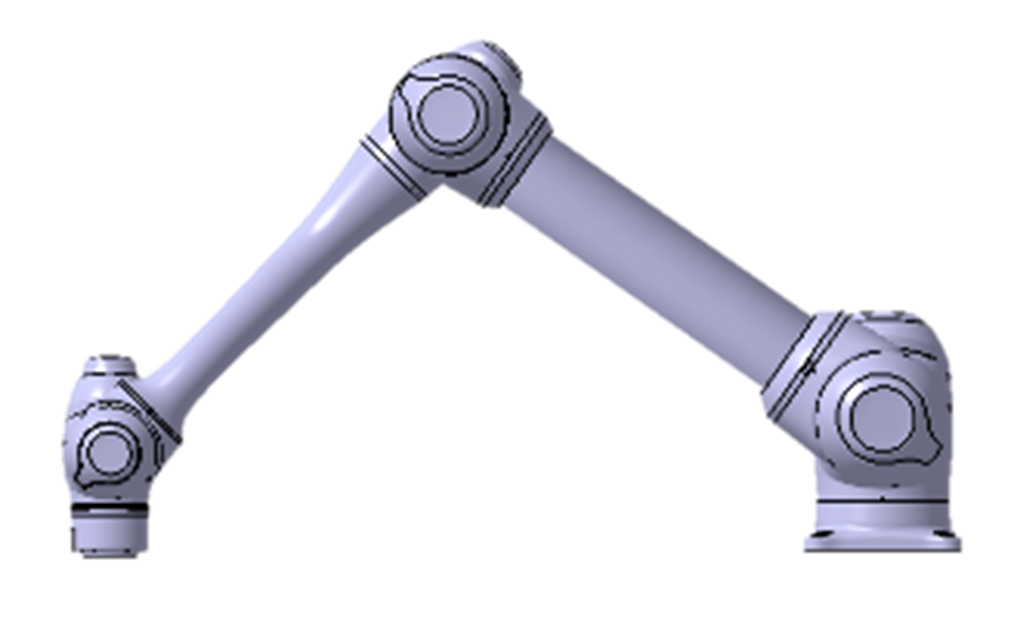
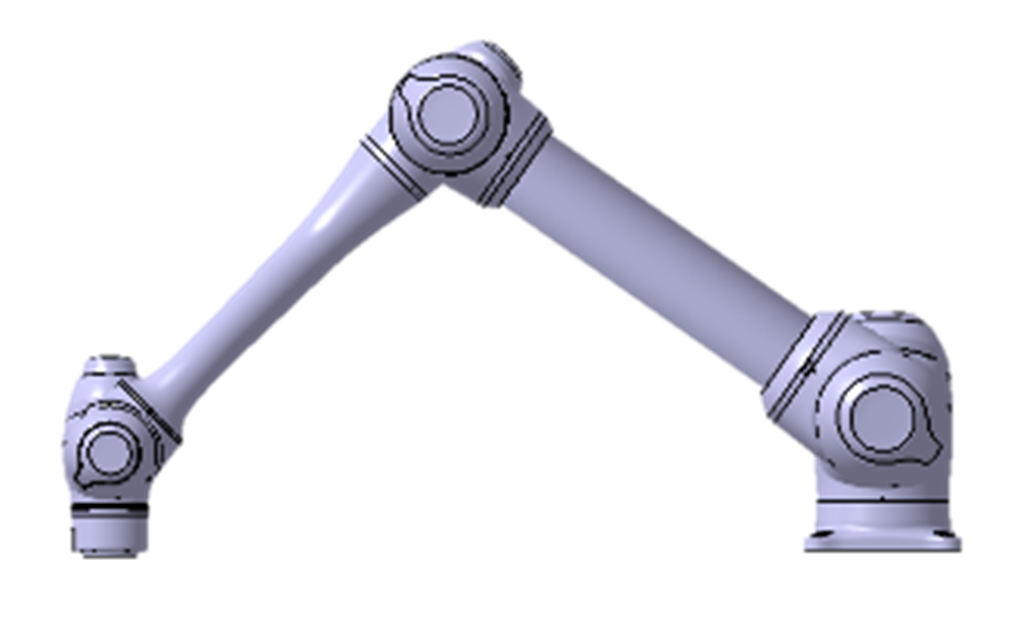
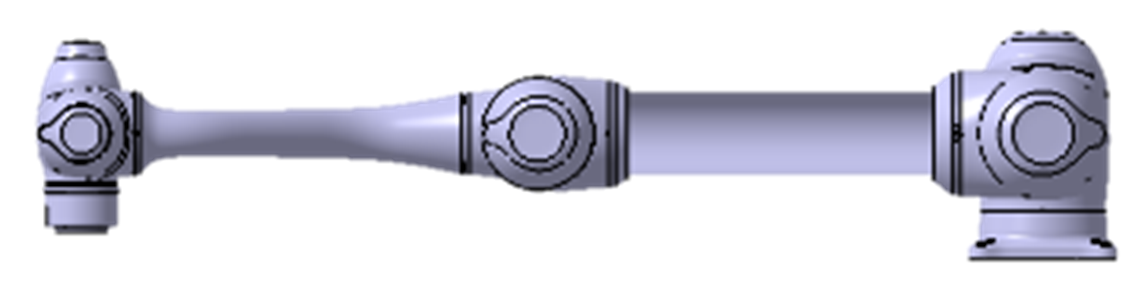
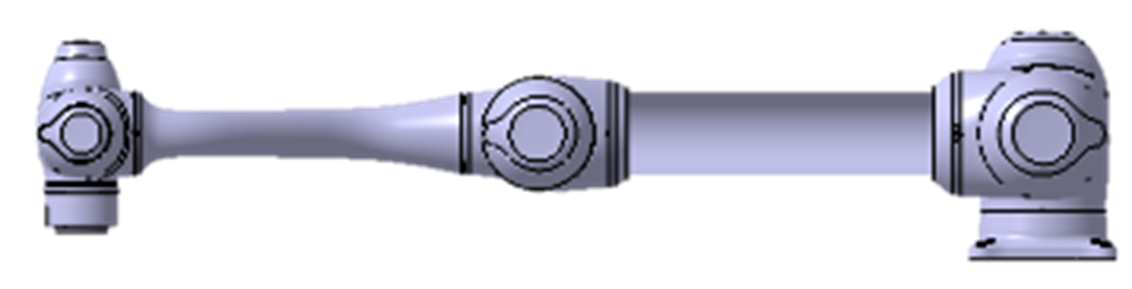
Stellung für Streckung von 33 %, 66 % und 100 %
| Gelenk 1 | Gelenk 2 | Gelenk 3 |
100 %-Streckung Stoppkategorie 0 |
 |
 |
 |
33 %-Streckung Stoppkategorie 1 |
 |
 |
- |
66 %-Streckung Stoppkategorie 1 |
 |
 |
- |
100 %-Streckung Stoppkategorie 1 |
 |
 |
 |
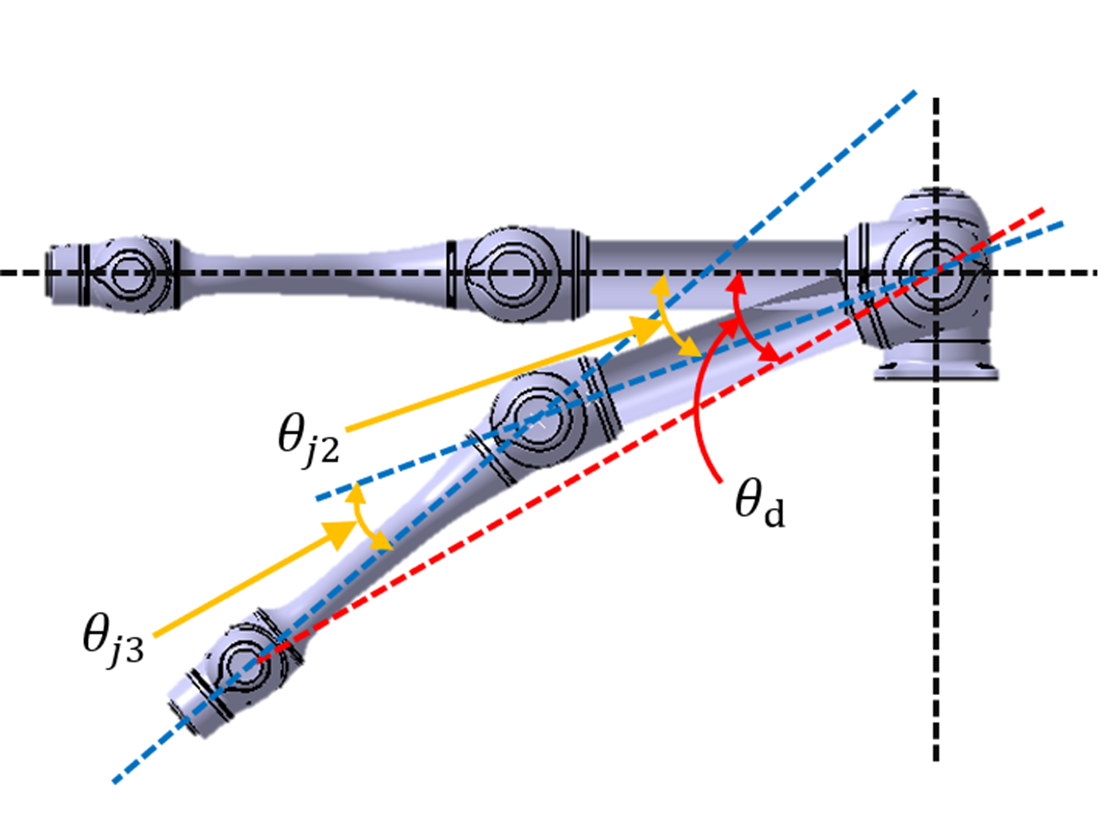
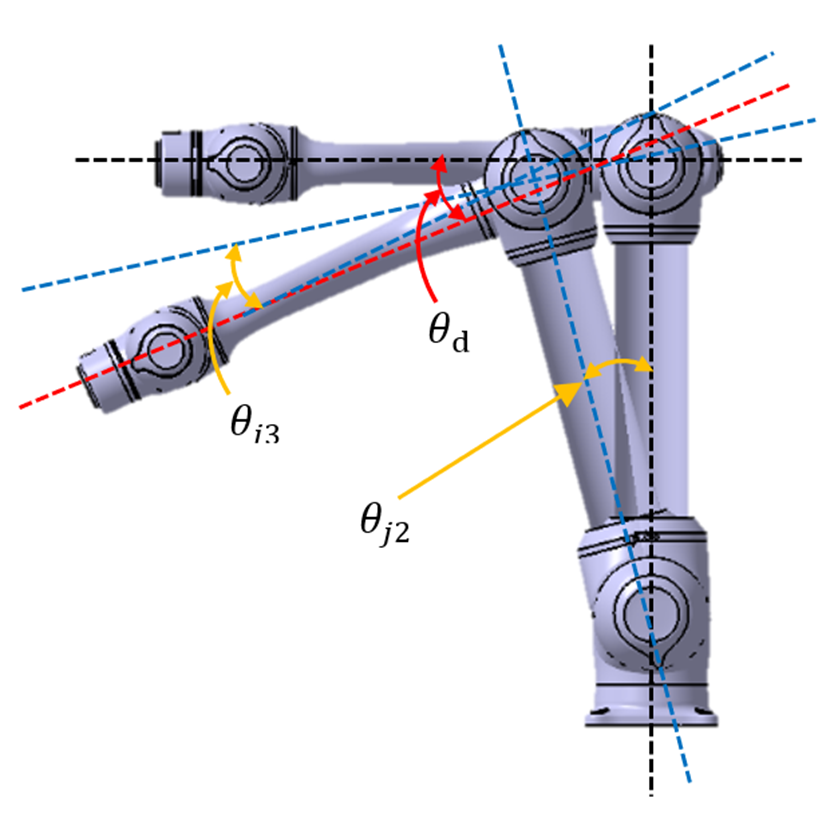
Stellung bei Stoppauslösung und gemessener Winkel (θd)
Gelenk 1 | Gelenk 2 | |
Gelenk 1 | 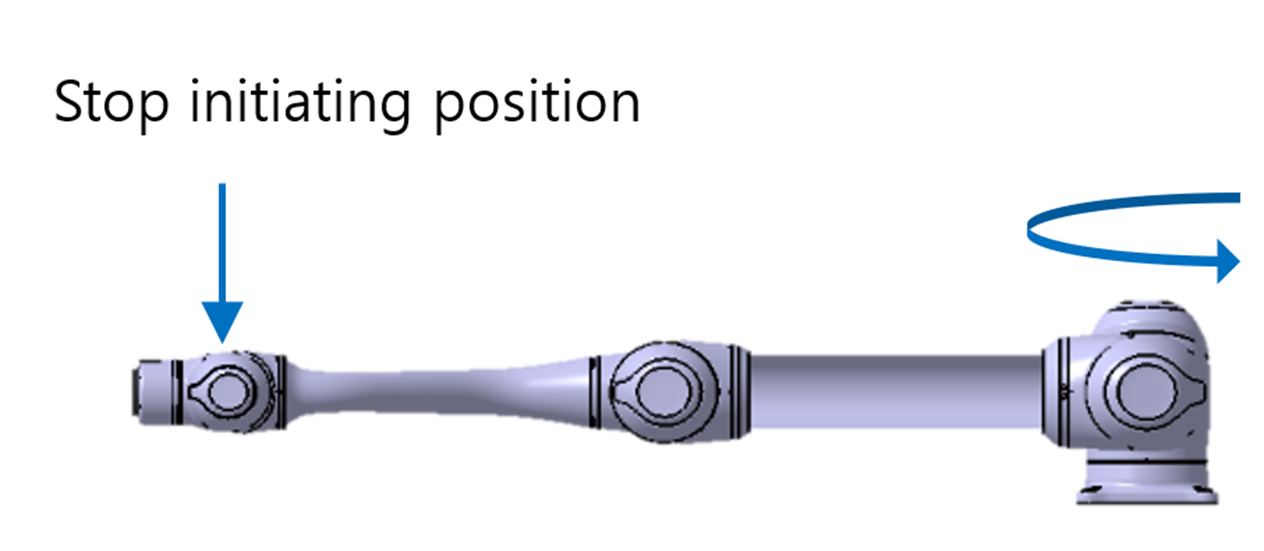 | No slip,
|
Gelenk 2 |
 |
 |
Gelenk 3 |
 |
 |