Produkteinführung (CS-06)
Bezeichnungen und Funktionen
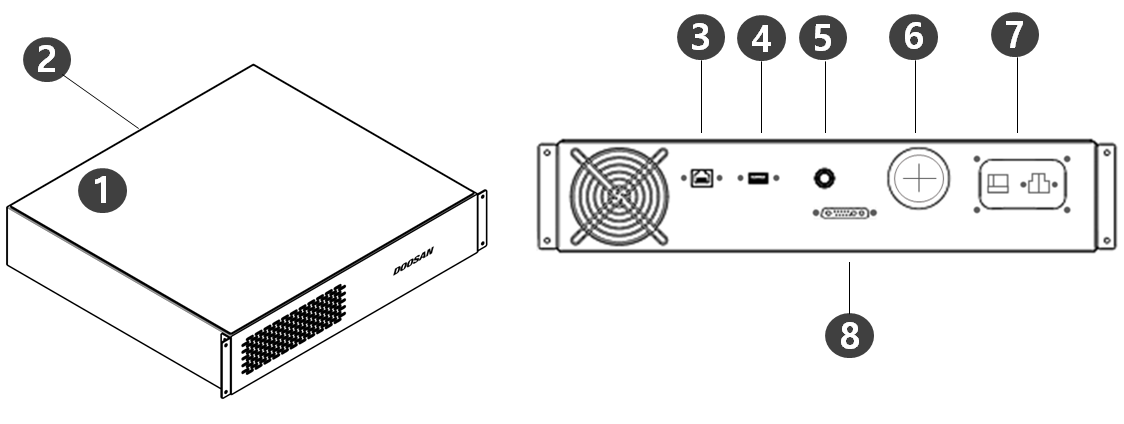
DC-Steuergerät (CS-06)
Nr. | Element | Beschreibung |
1 | I/O connection terminal (internal) | Ein Anschluss an die Steuergeräte anderer Roboter oder Peripheriegeräte ist nicht möglich. |
2 | Emergency stop button and Smart Pendant connection terminal | Anschluss des Kabels der Not-Aus-Taste oder des Kabels des Smart-Tableaus an das Steuergerät. |
3 | Network connection terminal | Laptops, TCP/IP-Ausrüstung und Ausrüstung mit Modbus sowie Kamerasensoren lassen sich an der Netzwerk-Anschlussklemme innerhalb des Steuergeräts anschließen. |
4 | USB connection terminal | Logboeken die tijdens de werking van de robot worden gegenereerd, kunnen worden opgeslagen op een USB-opslagapparaat, of taken kunnen worden geëxporteerd of geïmporteerd. |
| 5 | Emergency stop button and Smart Pendant connection terminal | Anschluss des Kabels der Not-Aus-Taste oder des Kabels des Smart-Tableaus an das Steuergerät. |
6 | External cable terminal | Terminal die externe apparaten kan aansluiten. |
7 | Power connection terminal | Anschluss der Stromversorgung an das Steuergerät. |
8 | Manipulator cable connection terminal | Anschluss des Kabels des Handhabungsautomaten an das Steuergerät. |
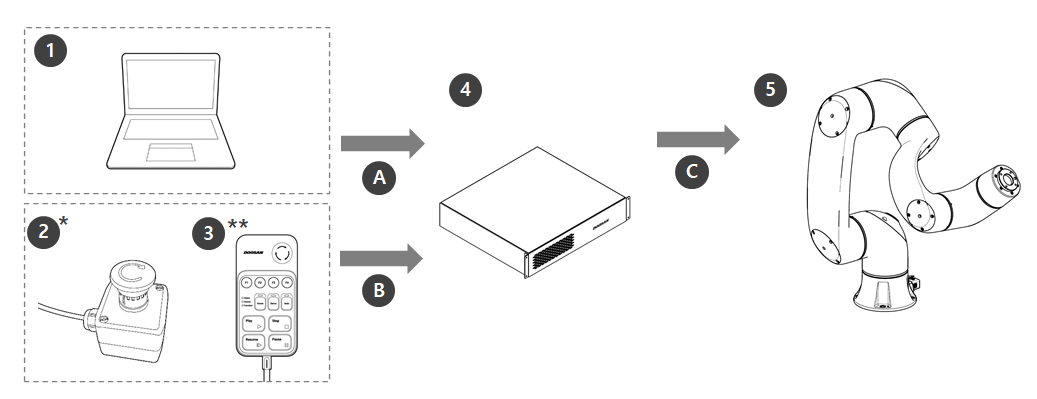
Systemkonfiguration
| Nr. | Element | Beschreibung |
|---|---|---|
| 1 | Laptop | Nach Installation der DART Plattform kann eine Arbeitsumgebung eingerichtet werden, welche identisch mit dem Bedientableau ist. Der Laptop ist nicht Bestandteil des Pakets, wird aber bei der Installation der „DART Plattform benötigt. |
| 2 | Not-Aus-Taste* | Wenn ein Laptop als Bestandteil des Systems eingesetzt wird, so dient dieser als Not-Aus-Taste des Bedientableaus |
| 3 | Smart-Tableau** | Der Roboter lässt sich einfach über ein Bedientableau steuern, das einfache Funktionen ausführen kann, wie z. B. das Ein- und Ausschalten des Servos oder das Ausführen/Schließen voreingestellter Programme. (separat als Option zu bestellen) |
| 4 | Steuergerät* | Steuert die Bewegung des Roboters entsprechend der im Bedientableau eingestellten Stellung oder Bewegung. Er verfügt über mehrere Eingangs-/Ausgangsanschlüsse (I/O), die eine Verbindung mit diversen Ausrüstungen und Geräten ermöglichen. |
| 5 | Handhabungsautomat* | Ein für Kollaboration ausgelegter Industrieroboter zum Transport und zur Montage mit verschiedenen Werkzeugen. |
| A | Befehl/ Überwachung | |
| B | Befehl | |
| C | Stromversorgung /Netzwerk |
- Funktionen sind jeweils als serienmäßig (*) und optional (**, d.h. separat erhältlich) klassifiziert
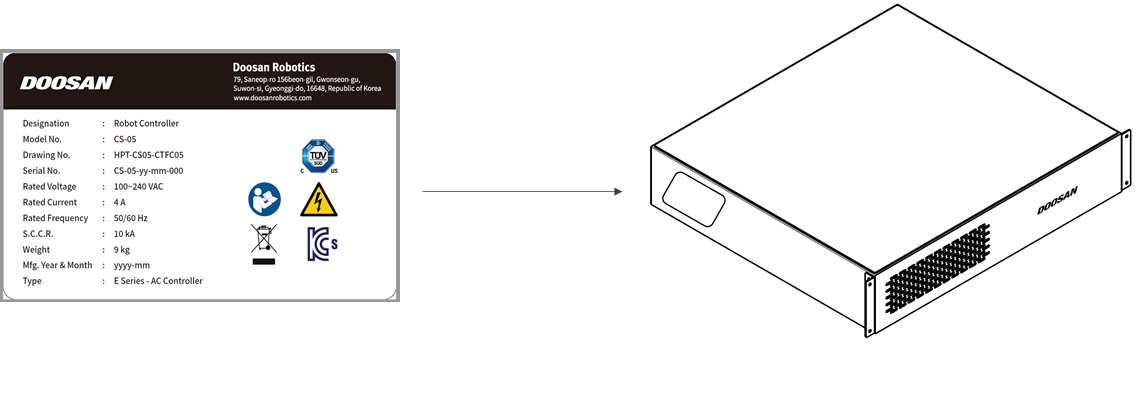
Plakette und Etikett